Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 270
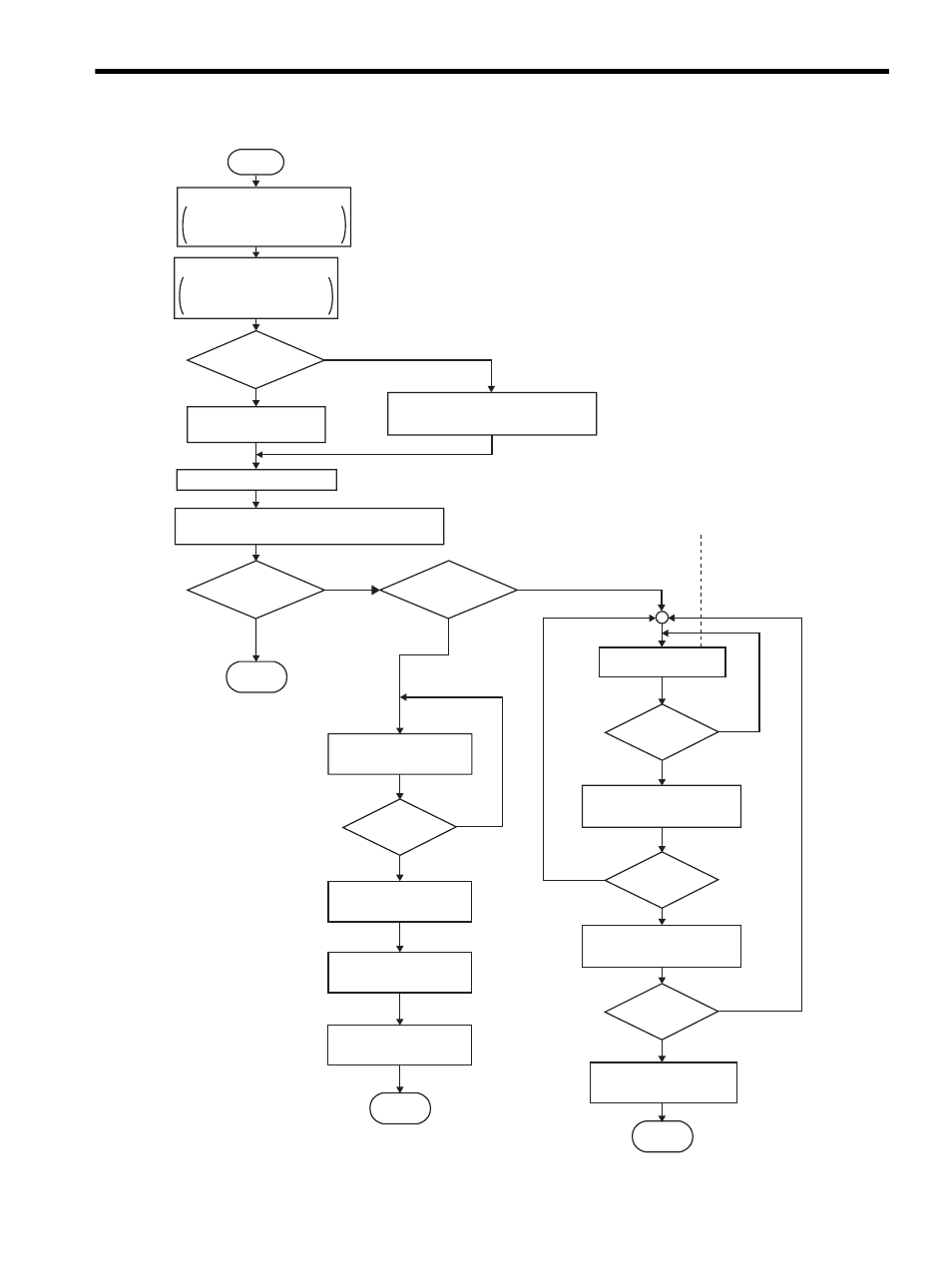
8.6 Servo Gain Adjustment Functions
8-43
Turn the power OFF and ON again.
No
Yes
No
Yes
No
Yes
Are the response
results satisfactory?
Execute utility function Fn015
(One-parameter Tuning for Less Deviation Control.)
Set the Gain-related Application
Switches to "Use Less Deviation
Control." (Pn10B.2 = 1)
Set the moment of inertia ratio.
Set the notch filter.
Positioning Control
Locus Tracking Control
Is Positioning Control
or Locus Tracking Control
being used?
Measure the frequency with the
function such as Fn019 and
set the notch filter if necessary.
Set the moment of inertia ratio in
Pn103 manually or set it with the
moment of inertia calculation.
Positioning Control
Increase the setting in
Pn119. (See note 1.)
Is there
overshooting?
Is there
overshooting?
Is there
overshooting?
Is there vibration?
1) Decrease the setting in Pn11E.
2) Decrease the setting in Pn144.
Locus Tracking
Control
End
Is Positioning Control
or Locus Tracking Control
being used?
No
Yes
No
Yes
1) Decrease the setting in Pn1A9.
Decrease the setting in Pn119
to a level where overshooting
is suppressed.
2) Decrease the setting in Pn1AA.
Increase the setting in Pn1AA
until there is vibration.
Increase the setting in Pn1A4
until there is vibration.
Increase the setting in Pn1A9
until there is vibration.
(See note 2.)
Note 2: The maximum value for
Pn1A9 is 80% of the setting
in Pn1AA. Do not increase
Pn1A9 beyond this level.
Increase the setting in Pn1A2.
Start
End
End
Note: Whenever it is possible,
change Pn119 with the
servomotor stopped.
Vibration may result from
any signficant changes of
Pn119.
Set the Gain-related Application Switches to
"Use Less Deviation Control with Reference
filter." (Pn10B.2 = 2)
Turn the power OFF and ON again.
No
Yes
No
Yes
No
Yes
Are the response
results satisfactory?
Execute utility function Fn015
(One-parameter Tuning for Less Deviation Control.)
Set the Gain-related Application
Switches to "Use Less Deviation
Control." (Pn10B.2 = 1)
Set the moment of inertia ratio.
Set the notch filter.
Positioning Control
Locus Tracking Control
Is Positioning Control
or Locus Tracking Control
being used?
Measure the frequency with the
function such as Fn019 and
set the notch filter if necessary.
Set the moment of inertia ratio in
Pn103 manually or set it with the
moment of inertia calculation.
Positioning Control
Increase the setting in
Pn119. (See note 1.)
Is there
overshooting?
Is there
overshooting?
Is there
overshooting?
Is there vibration?
1) Decrease the setting in Pn11E.
2) Decrease the setting in Pn144.
Locus Tracking
Control
End
Is Positioning Control
or Locus Tracking Control
being used?
No
Yes
No
Yes
1) Decrease the setting in Pn1A9.
Decrease the setting in Pn119
to a level where overshooting
is suppressed.
2) Decrease the setting in Pn1AA.
Increase the setting in Pn1AA
until there is vibration.
Increase the setting in Pn1A4
until there is vibration.
Increase the setting in Pn1A9
until there is vibration.
(See note 2.)
Note 2: The maximum value for
Pn1A9 is 80% of the setting
in Pn1AA. Do not increase
Pn1A9 beyond this level.
Increase the setting in Pn1A2.
Start
End
End
Note: Whenever it is possible,
change Pn119 with the
servomotor stopped.
Vibration may result from
any signficant changes of
Pn119.
Set the Gain-related Application Switches to
"Use Less Deviation Control with Reference
filter." (Pn10B.2 = 2)