3) holding brake setting, 32 (3) holding brake setting – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 221
7 Operation
7.6.2 Using the Holding Brake
7-32
(3) Holding Brake Setting
Set the following parameters to adjust brake ON timing so the holding brake is applied after the servomotor
stops.
Set the brake timing used when the Servo is turned OFF by the SV_OFF command or alarm occurrence during
servomotor with brake operation.
Brake ON timing when the servomotor stops must be adjusted properly because servomotor brakes are designed
as holding brakes. Adjust the parameter settings while observing machine operation.
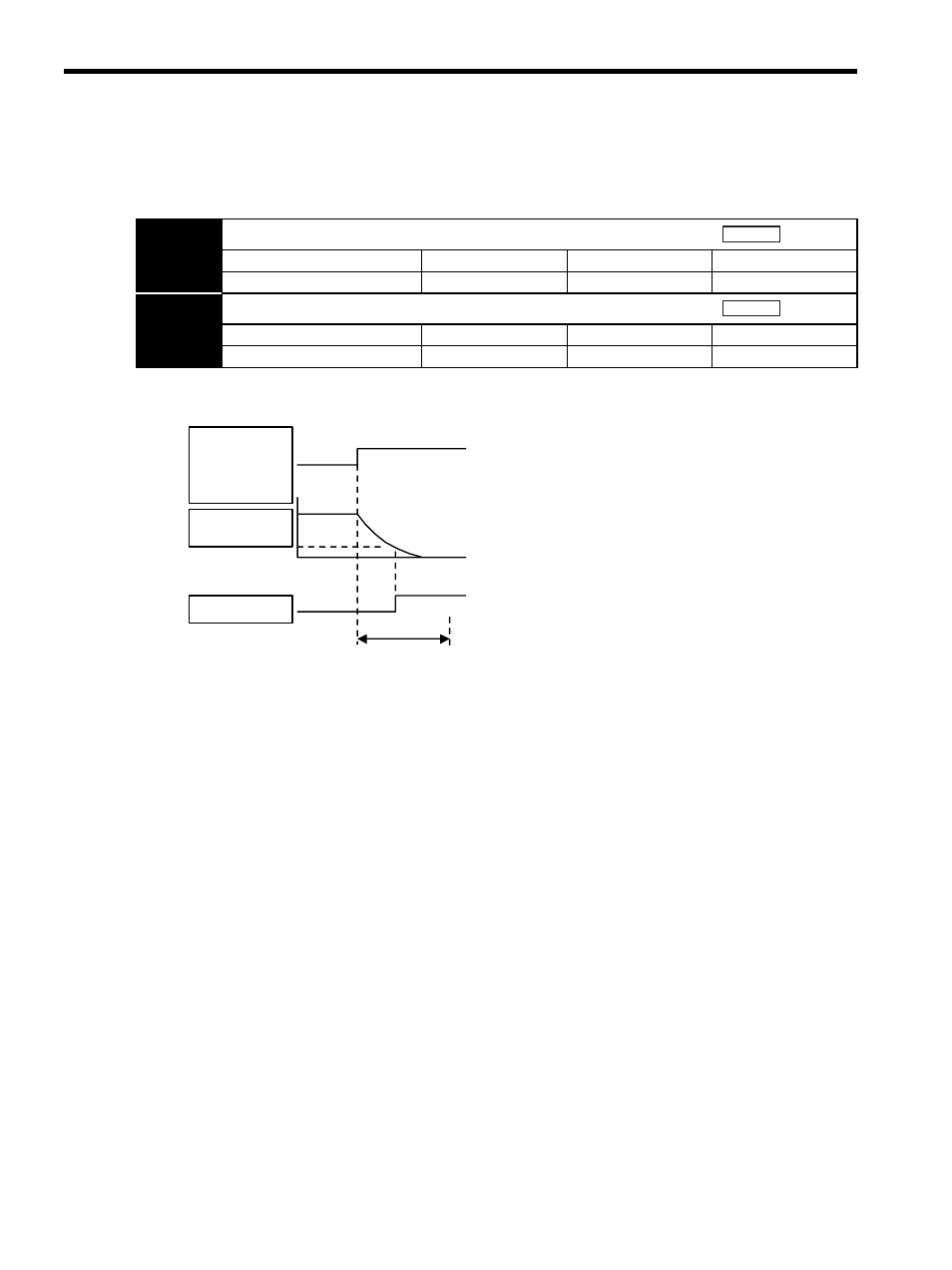
• /BK Signal Output Conditions During Servomotor Operation
The circuit is open under either of the following conditions:
• Motor speed drops below the setting at Pn507 after Servo OFF.
• The time set at Pn508 has elapsed since Servo OFF.
The actual setting will be the maximum speed even if Pn507 is set higher than the maximum speed.
Pn507
Brake Reference Output Speed Level during Motor Operation
Setting Range
Setting Unit
Factory Setting
Setting Validation
0 to 10000
1 RPM
100
Immediately
Pn508
Waiting Time for Brake Signal when Motor Running
Setting Range
Setting Unit
Factory Setting
Setting Validation
10 to 100
10 ms
50
Immediately
Position
Position
SV_OFF
command
Motor speed
(min )
Pn-507
/BK output
Stop by dynamic brake
or coast to a stop.
(Pn001.0)
Pn508
Release
brake
Servo ON
Hold with brake
Servo OFF
-1
(RPM)