Caution – Yaskawa iQpump Controller Programming Manual User Manual
Page 195
YASKAWA TM.iQp.07 iQpump Controller Programming Manual
195
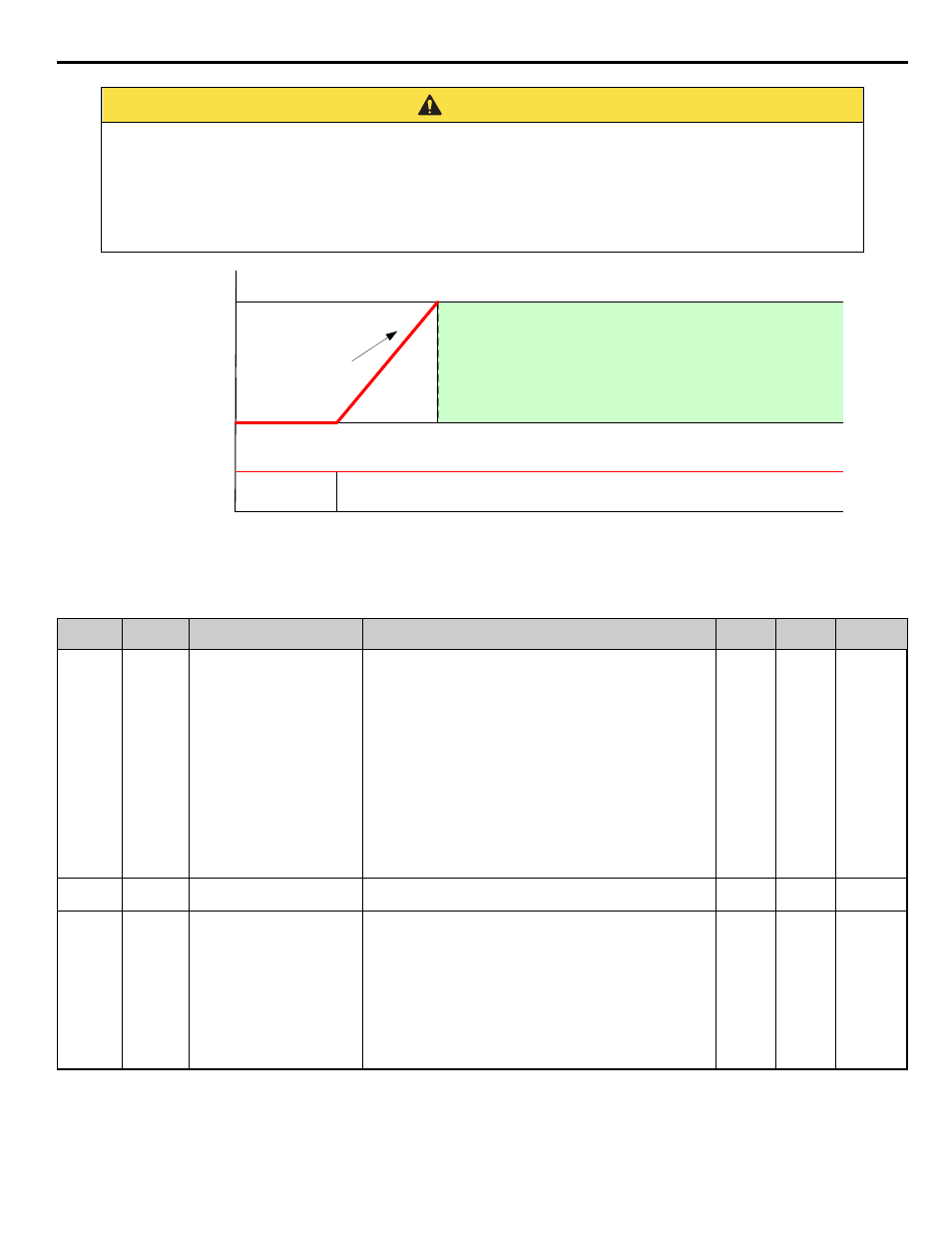
Figure 1.146
Figure 150.
Table 73 Related Parameters
CAUTION
The following procedures are necessary for proper protection and setup of a submersible pump, for example
Franklin Electric Submersible Pumps.
The Franklin Electric Submersible Pump (motor) requires an acceleration and deceleration time of one second when
accelerating up from 0 - 30 Hz, or decelerating down from 30 - 0 Hz. The frequency reference of 30 Hz is the minimum
allowable speed of the Franklin Electric motors. Please verify that the pump (motor) running at 30 Hz does not produce
too much pressure for the pump application. Shut-off pressure at 30 Hz is 25% of shut-off pressure at 60 Hz.
Parameter
No.
Addr.
Hex
Parameter Name
Digital Operator Display
Description
Range
Default
Menu
Location
P4-04
0118
Thrust Bearing Acceleration
Time
Thrust Acc. Time
Sets the thrust bearing acceleration time. When enabled (P4-05 > 0),
the drive output frequency will ramp up to the specified thrust
bearing frequency reference in P4-05 using an acceleration time as
specified in P4-04. The PI mode is automatically disabled.
Once the output frequency reaches the programmed thrust bearing
frequency, the drive automatically switches to PI control and the
original acceleration time (C1-01), and will continue in the normal
operation (auto) mode, unless Pre-charge is enabled, in which case
Pre-charge mode occurs.
This function active in the Hand Mode and Auto Mode.
Note:
In Auto Mode, the Minimum Pump Frequency will become
the thrust bearing frequency if smaller than the thrust bearing
frequency in P4-05.
In Hand Mode, the minimum frequency is P4-05 when the thrust
mode is enabled. The Pre-charge level is not active in the hand mode.
0.0 ~ 600.0
1.0 s
Programming
P4-05
0119
Thrust Bearing Frequency
Thrust Freq.
Sets the frequency reference used when the thrust bearing function is
active. A value of 0 disables this function.
0.0 ~ 120.0 30.0 Hz Programming
P4-06
<0032>
011A
Thrust Bearing Deceleration
Time
Thrust Dec Time.
This deceleration time will be used to bring the drive from Thrust
Frequency (P4-05) to stop when Thrust Mode is active. Any time the
Run Command is removed while the drive is operating in the Thrust
Mode above the Thrust Frequency, this deceleration time will be used
once the frequency reference is at or below the Thrust Frequency.
Note:
In Auto Mode, the Minimum Pump Frequency (P1-06) will
become the thrust bearing frequency if smaller than the thrust bearing
frequency in P4-05.
In Hand Mode, the minimum frequency is P4-05 when the thrust
mode is enabled. The Pre-charge level is not active in the hand mode.
0.0 ~ 600.0
1.0 s
Programming
TIME
0 Hz
Thrust Freq.
P4-05
Stop
Auto Mode Run Command
Auto Mode Run
PI Enabled, Continue Normal Auto Operation
Acceleration
Time P4-04
PI Disabled