B5 pi function, Table 6 pi setpoint options, Yaskawa – Yaskawa iQpump Controller Programming Manual User Manual
Page 32: Tm.iqp.07 iqpump controller programming manual
32
YASKAWA
TM.iQp.07 iQpump Controller Programming Manual
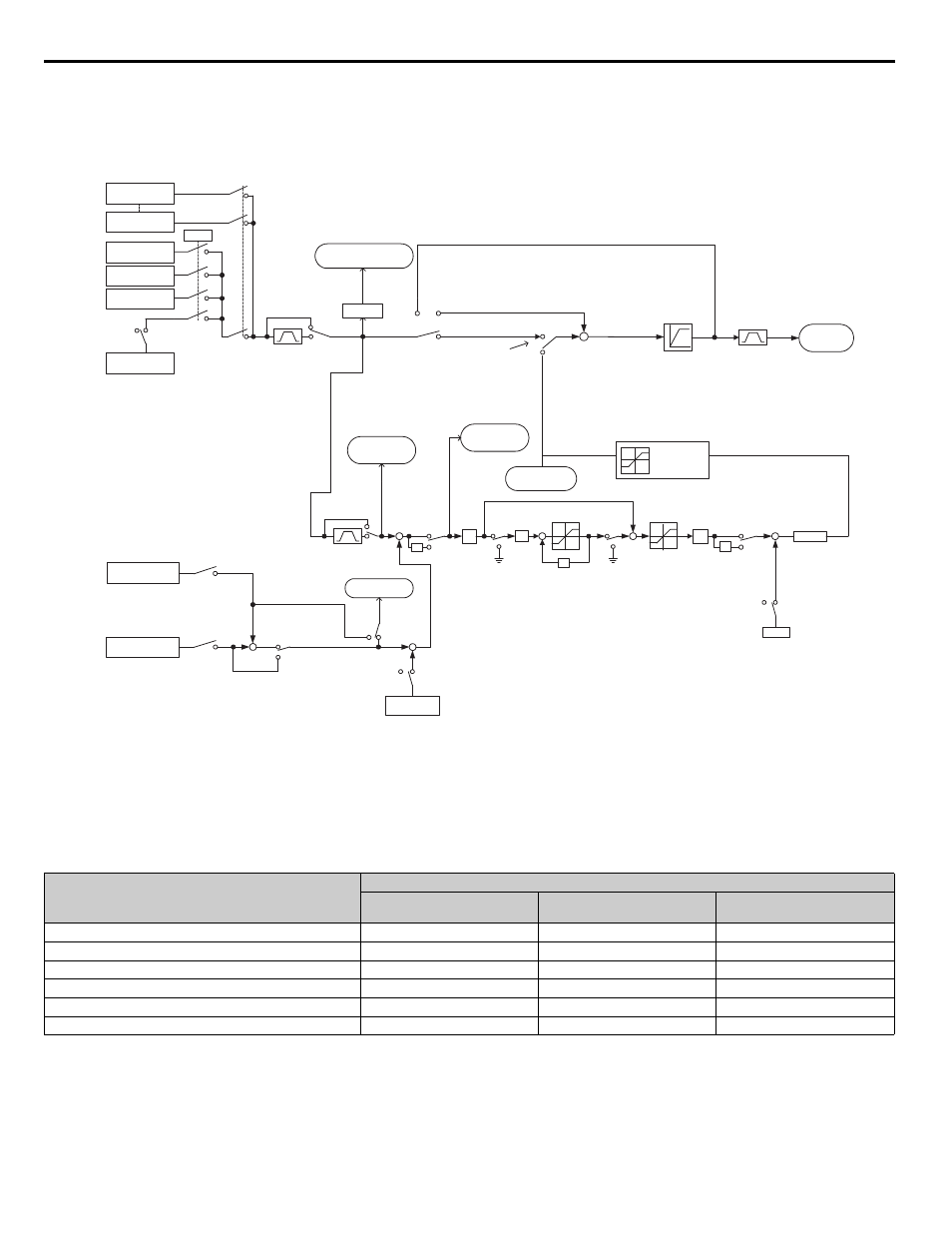
b5 PI Function
The capability to accept an analog signal as feedback for a PI (Proportional + Integral) control function is built into the drive.
Figure 1.26
Figure 26. PI Block Diagram
The analog feedback to the iQpump drive for the PI control is via the A2 terminal. The iQpump drive must be programmed (H3-09 = “B:
PI Feedback”) to use terminal A2 as feedback for the PI functionality of the drive.
The PI Setpoint can be configured to come from one of many different inputs or parameters.
describes the options for
originating the PI Setpoint.
Table 6 PI Setpoint Options
In some situations there are two feedback inputs. The drive can be programmed to maintain a set differential between two analog signals.
If input A2 is configured as a “PI Differential Mode” (H3-09 = “16: PI Differential”), then the iQpump drive will maintain a set
difference between the measurements read on inputs A1 and A2. This differential setpoint is programmed by parameter (b5-07).
The PI Setpoint will be read from:
If these conditions are true
Status of b5-18 =
Status of MEMOBUS /
Modbus Register 0Fh bit 1
Status of b1-01 =
Parameter b5-19
1
N/A
N/A
MEMOBUS/Modbus Register 06H
0
ON
N/A
D1-01
0
OFF
0
Terminal A1
0
OFF
1
Serial Comm.
0
OFF
2
Option PCB
0
OFF
3
Option Card
Serial Com
Terminal A1
D1-01
D1-04
D1-02
Output
frequency
P
1/t
1/t
Z
-1
b1-01
1
2
3
Frequency Reference
using multi-step
command
Frequency reference
(U1-01)
PI Set Point
(U1-38)
Proportional
gain
b5-02
I-time
b5-03
I - limit
b5-04
PI Limit
b5-06
PI delay time
b5-08
PI offset
(b5-07)
+
+
+ +
PI output monitor
(U1-37)
b5-01=0
ON
PI control is OFF under the following
conditions:
- b5-01=0
- H3-xx=19 and the terminal status is
ON
Upper limit
Fmax x109%
+
+
b5-01=3
b5-01=1
Lower limit 0
4
Integral Hold
H1-xx=31
Integral Reset
H1-xx=30
PI Output
Characteristic
b5-09
1
0
PI SFS
b5-17
PI SFS cancel
H1-xx=34
0
1
P1-03
Scaling
Terminal A1
Terminal A2
PI Differential
Fdbk. H3-09=16
1
0
H3-09=B
1
0
1
0
PI Differential
Fdbk. H3-09=16
PI Differential
Fdbk. H3-09=16
Z
-1
1
0
1
0
PI Input
Caracteristic
H1-xx=35
1
0
Z
-1
PI SFS
b5-17
PI SFS cancel
H1-xx=34
0
1
Scaling
PI Input
(U1-36)
+
-
0
1
PI Differential
Fdbk. H3-09=16
PI Feedback
(U1-24)
Scaling
1
0
1
0
b5-07
0
1
+
+
PI Differential
Fdbk. H3-09=16
-
+
+
+
b5-10
PI Output
Gain
PI offset
H3-09=16
SFS
OFF
PI Differential
Fdbk. H3-09=16
Characteristic
H1
P1-06
Minimum
Pump Speed
Speed Command / PI Setpoint
PI Setpoint
PI Feedback