Function: pi sfs cancel (setting: 34), Function: input level sel (setting: 35), Function: option / inv sel 2 (setting: 36) – Yaskawa iQpump Controller Programming Manual User Manual
Page 66: Function: motor pre-heat (setting: 60)
66
YASKAWA
TM.iQp.07 iQpump Controller Programming Manual
■
Function: PI SFS Cancel (Setting: 34)
SFS means softstart, also referred to as accel / decel in this description.
By configuring a digital input as a PI SFS (softstart) Cancel input (H1-0x = 34), the operator will be able to use a contact closure to
remove the acceleration and deceleration times that are applied to changes in the PI Setpoint by the b5-17 parameter. If the digital input
configured as PI SFS Cancel is closed, the PI Setpoint Accel / Decel (Parameter b5-17) will be ignored. Immediate updating of any
change to the setpoint will apply.
■
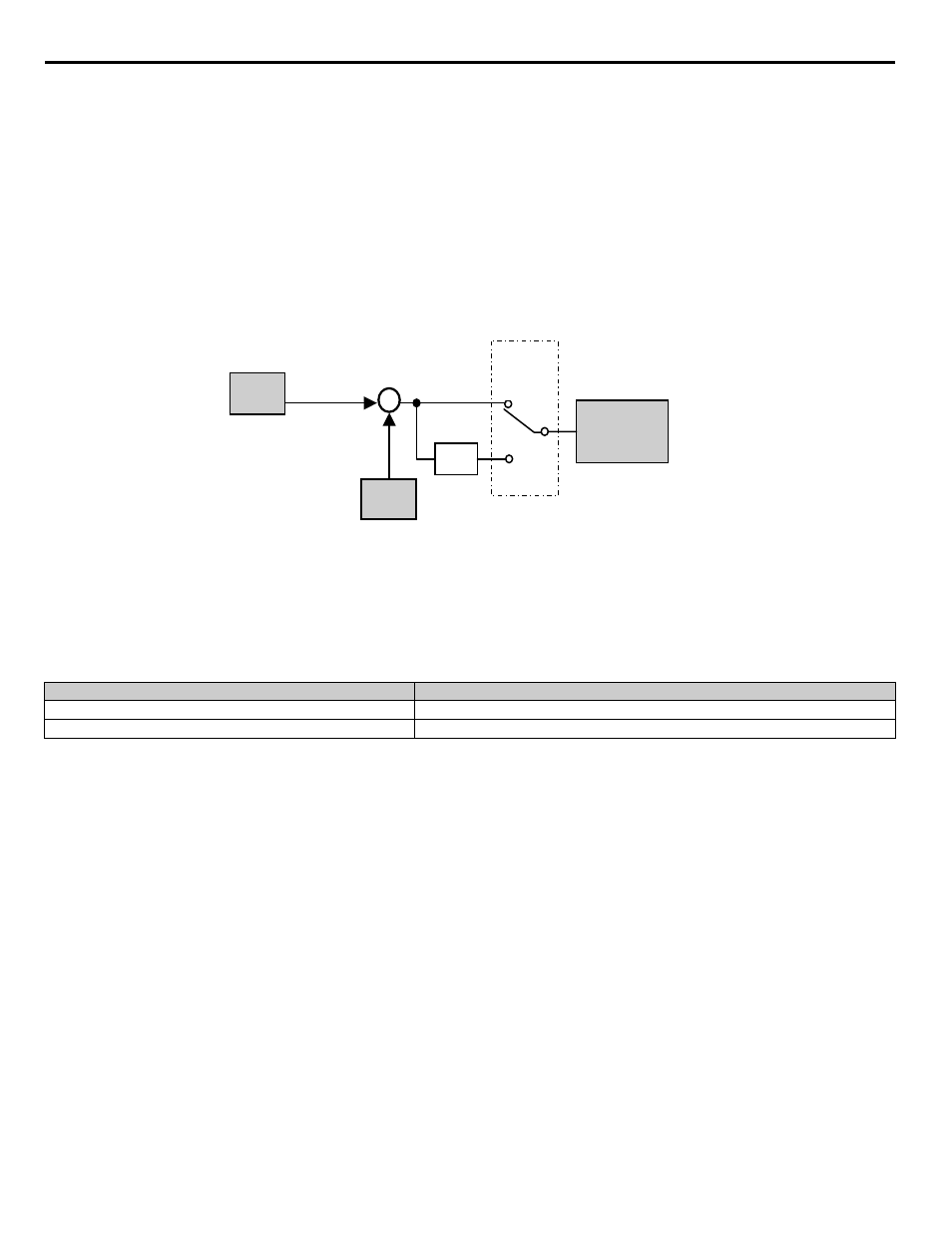
Function: Input Level Sel (Setting: 35)
When using the PI Function built into the drive, the chosen setpoint is compared with the measured feedback. The difference is called the
Error. The proportional and integral function are applied to this error. For some applications it may be appropriate to invert the input to
the PI block. This can be accomplished by setting one of the digital inputs up as an Input Level Sel (H1-0x = 35). When an Input Level
Sel digital input is closed the Error will be inverted before it is passed to the PI block.
Figure 1.47
Figure 47. PI Error signal Inversion Block Diagram
■
Function: Option / Inv Sel 2 (Setting: 36)
The Option / Inv Selection function allows the user to switch the source of the Run and speed command between the drive’s terminals and
optional communication card. When a digital input is programmed for the Option / Inv Selection 2 function (H1-0x = 36) that input will
function as follows:
Table 25 Programming Choices
To switch the command source between the option card and the terminals be sure to program the following parameters:
• Set b1-01 (Frequency Reference Selection) to 1 (Terminals).
• Set b1-02 (Run Command Selection) to 1 (Terminals).
• Set H1-0x (Input Terminal Function Selection) to 36.
Important: Switching the Reference and RUN sources can only be done while the iQpump drive is stopped.
■
Function: Motor Pre-heat (Setting: 60)
In order to prevent condensation on the motor windings, a DC current can be circulated through the windings. The heat produced by the
current in the windings will prevent the moisture from condensation on the wire. Motor pre-heating can only be initiated by closing a
digital input programmed as a Motor Pre-heat input (H1-0x = 60). The level of the DC current used by the Motor Pre-heat function is
determined by parameter b2-09.
A Run input will be given priority over a Motor Pre-heat input. When the Run command is removed, if the Motor Pre-heat input is still
closed, the motor pre-heating will resume.
Option / Inv Function Input Status
Run and Speed Command Source
CLOSED
From the Communications Option Card
OPEN
From the control circuit and analog input terminals
Set
Point
+
-
Z
-1
PI Block
Feed
back
H1=0x=35
OP
CLOSED
Open
Closed