Notes – Yaskawa MotionWorks IEC User Manual
Page 200
PLCopenPlus Function Blocks for Motion Control 2013-04-13
192
the busy output is set.
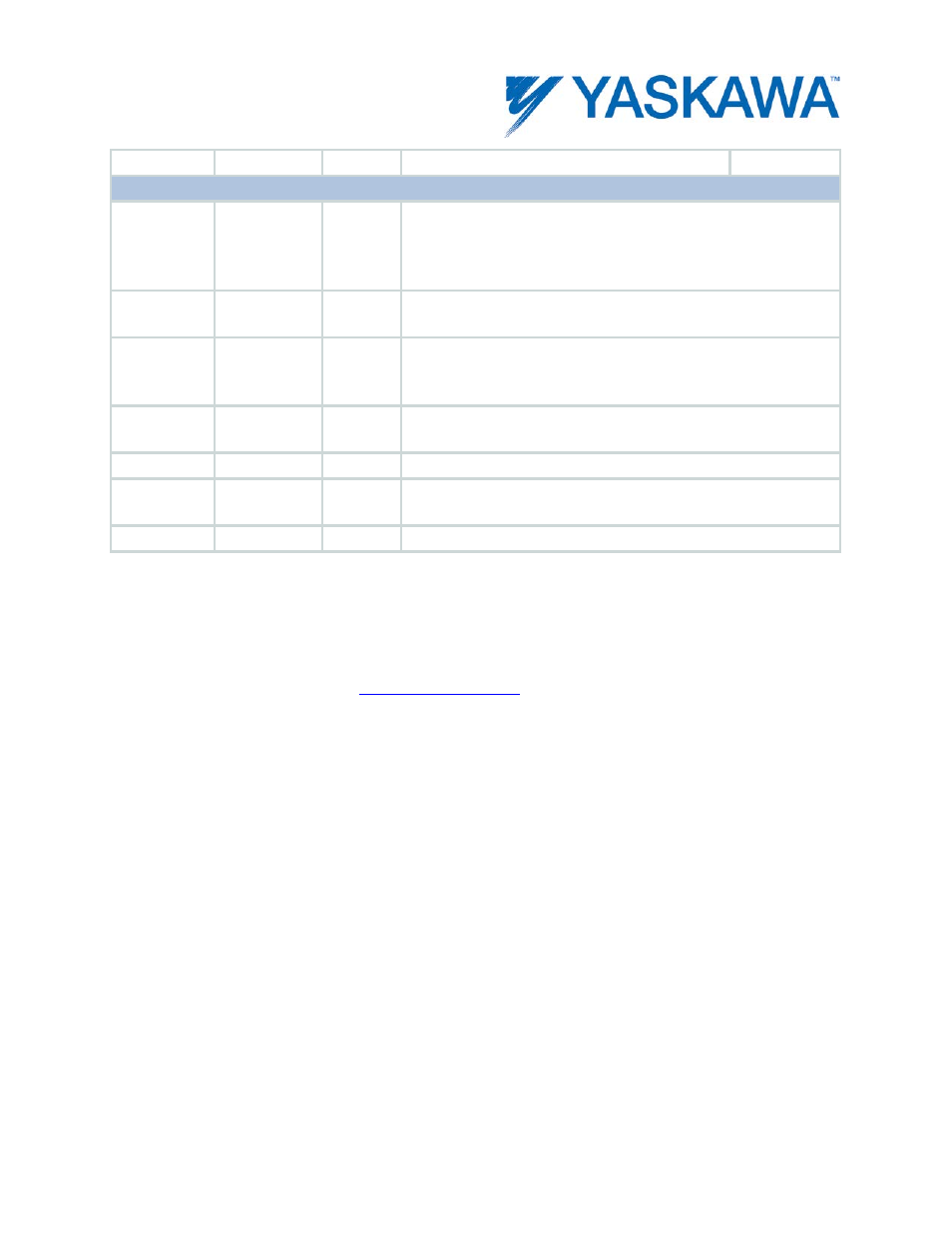
VAR_OUTPUT
B
Done
BOOL
Set high when the commanded action has been completed
successfully. If another block takes control before the action is
completed, the Done output will not be set. This output is reset
when execute goes low.
B
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable' input,
and reset if Done, CommandAborted, or Error is true.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or 'Enable'
goes low.
B
ErrorID
UINT
If error is true, this output provides the Error ID. This output is
reset when 'Execute' or 'Enable' goes low.
B
CamTableID
UINT
A reference to the cam memory in the motion engine.
V
MasterCycle
LREAL
Difference between the last and first master positions in the
table
V
SlaveCycle
LREAL
Difference between the last and first slave positions in the table
Notes
• Supported File Naming Convention: 8.3 format.
series controllers.
• Supported File format: .CSV file - simple master slave pairs with linear
interpolation between the points
1. This file has an optional header with the following values:
• ‘MasterIncremental’ (case insensitive): If ‘TRUE’ (case insensitive)
or ‘1’, then the master values are incrementally defined. In other
words, each value represents an addition to the previous value. The
default is false.
• ‘SlaveIncremental’ (case insensitive): If ‘TRUE’ (case insensitive) or
‘1’, then the slave values are incrementally defined. In other words,