Determining when motion is complete – Yaskawa MotionWorks IEC User Manual
Page 391
PLCopenPlus Function Blocks for Motion Control 2013-04-13
383
Determining When Motion is Complete
, and
, indicates that the controllers
motion profiler has completed the calculations for the move as specified by
the function block inputs. The axis may physically be in motion and still
settling on the final commanded position based on tuning parameters, load
inertia, friction, and other factors. To determine when the actual motion
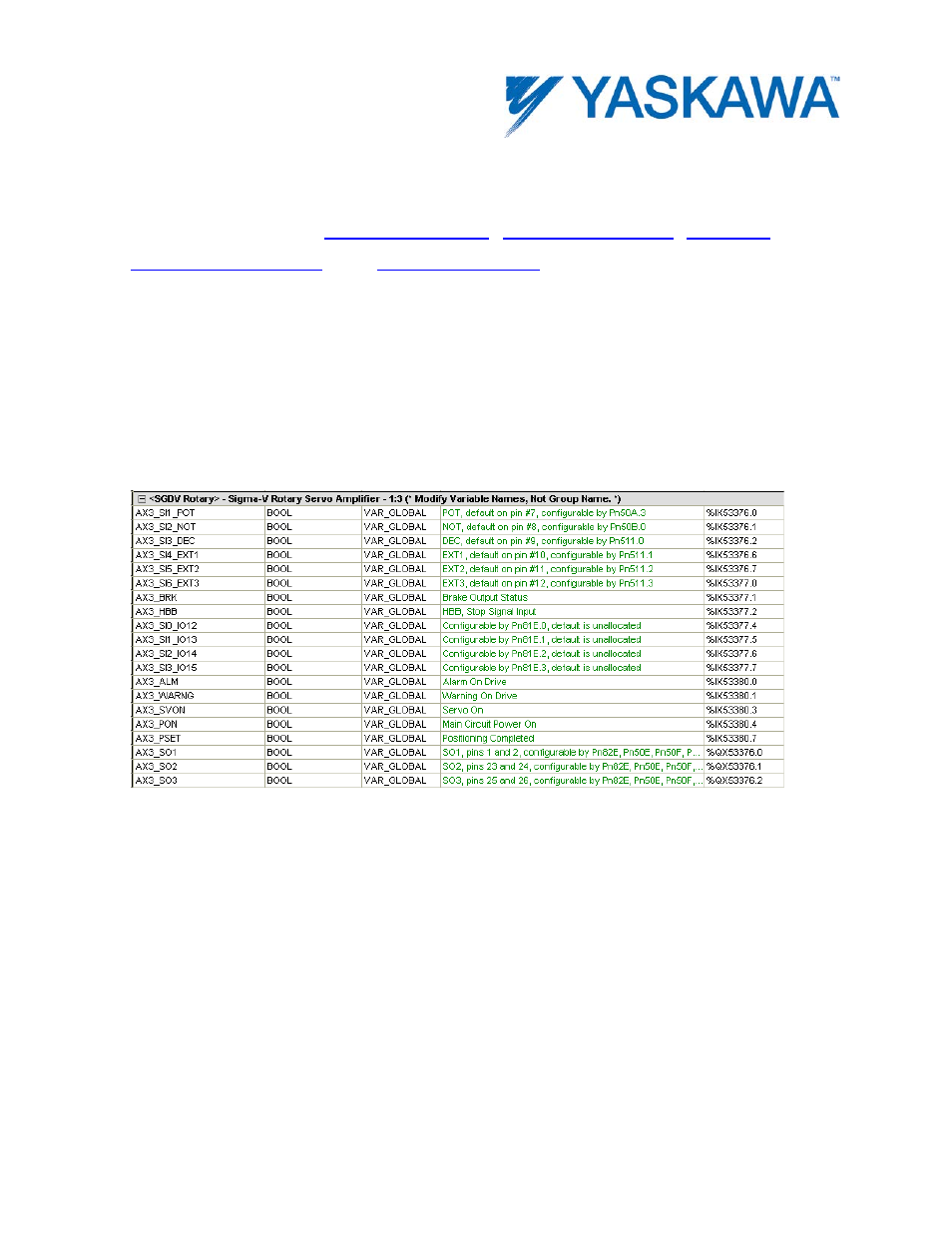
has reached the commanded position, use the P_SET Global variable
provided by the Hardware Configuration.
Note that P_SET will be ON any time the actual position is within a certain
distance of the commanded position, as specified by Servopack Pn 522, so
it is recommended to use P_Set in conjunction with the Done out of a
motion function block. See the following graphics for examples.