Parameters – Yaskawa MotionWorks IEC User Manual
Page 83
PLCopenPlus Function Blocks for Motion Control 2013-04-13
75
Parameters
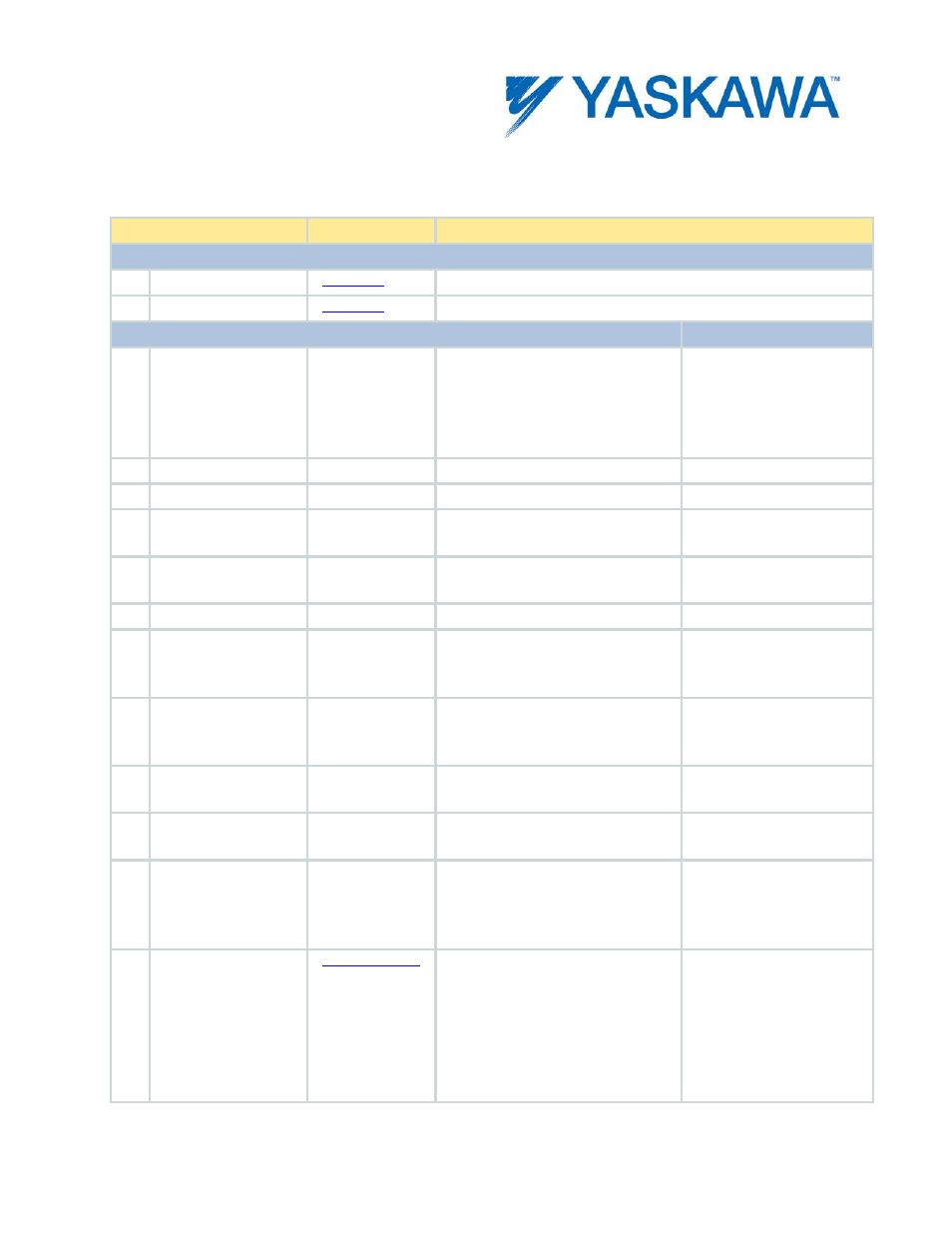
Parameter
Data type
Description
VAR_IN_OUT
B
Master
A logical reference to the master axis
B
Slave
A logical reference to the slave axis
VAR_INPUT
Default
B
Execute
BOOL
Upon the rising edge, all other
function block inputs are read and
the function is initiated. To modify
an input, change the value and
re-trigger the execute input.
FALSE
B
RatioNumerator
DINT
Gear ratio numerator
DINT#0
B
RatioDenominator
DINT
Gear ratio denominator
DINT#1
B
MasterSyncPosition
LREAL
Master Position at which the axes
are synchronized
LREAL#0.0
B
SlaveSyncPosition
LREAL
Slave position at which the axes
are synchronized
LREAL#0.0
E
SyncMode
INT
Reserved for future use
INT#0
E
MasterStartDistance
LREAL
Master Distance for
synchronization procedure. See
Note Below
LREAL#0.0
E
Velocity
LREAL
Maximum Velocity allowed by the
slave during 'StartSync' to the
'InSync' event
LREAL#0.0
E
Acceleration
LREAL
Acceleration limit while
attempting to Engage
LREAL#0.0
E
Deceleration
LREAL
Deceleration limit while
attempting to Engage
LREAL#0.0
E
Jerk
LREAL
Value of the Jerk [u/s
3
]. Value of
the jerk in user units/second^3.
Jerk not supported . Reserved for
future use.
LREAL#0.0
E
BufferMode
Defines the behavior of the axis -
allowable modes are Aborting,
Buffered, BlendingLow,
BlendingPrevious, BlendingNext,
and BlendingHigh.-
MC_BufferMode#Aborting
MC_BufferMode#Buffered
MC_BufferMode#Aborting