Yaskawa MotionWorks IEC User Manual
Page 206
PLCopenPlus Function Blocks for Motion Control 2013-04-13
198
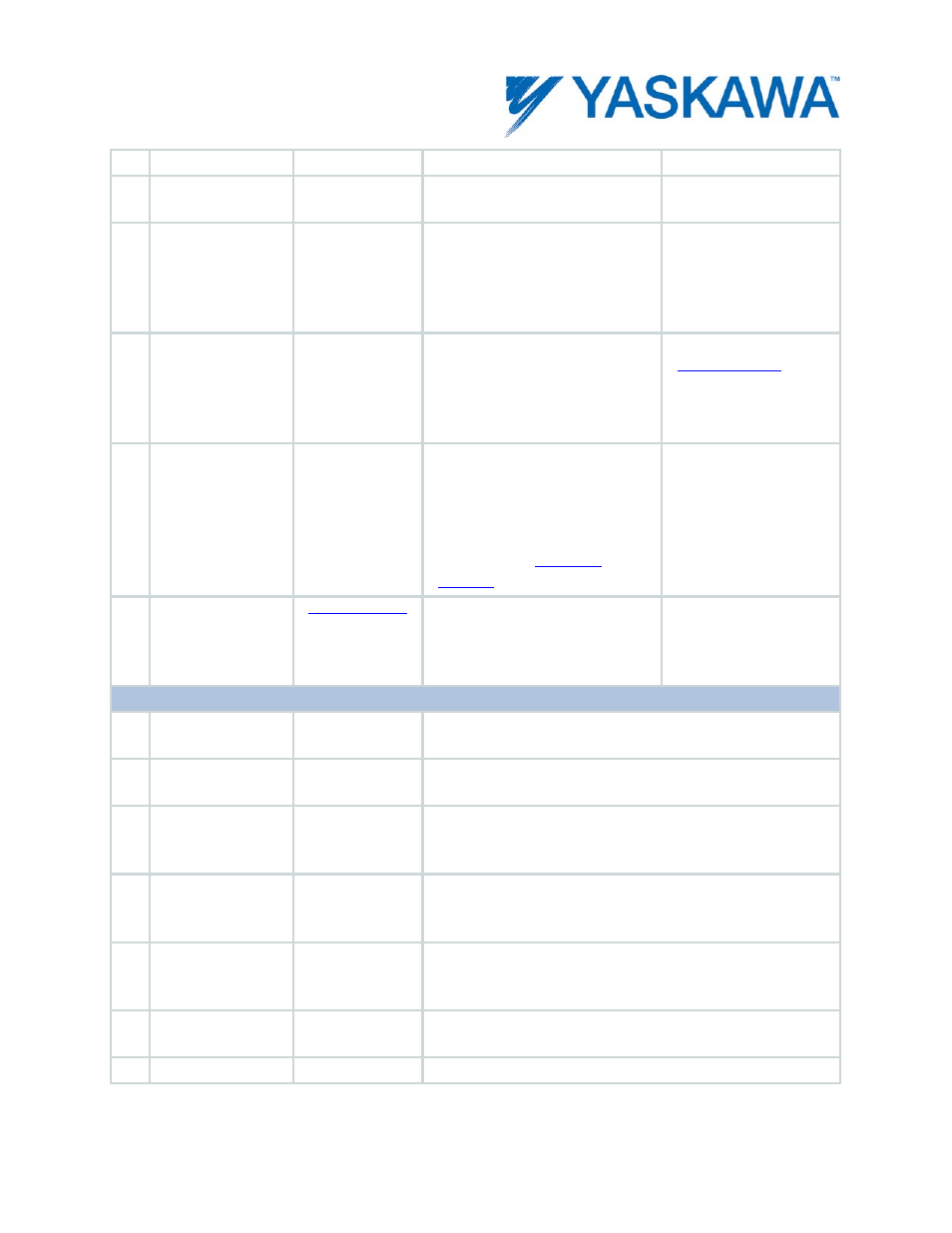
input.
B
CamTableID
UINT
A reference to the cam memory
in the motion engine.
UINT#0
E
EngagePosition
LREAL
The master position at which the
slave starts following the
master. Units are those of the
cam master. See EngageData
details below.
LREAL#0.0
V
EngageWindow
LREAL
The cam will engage at any
master position from
EngagePosition +/-
(EngageWindow)/2. Units are
those of the cam master.
1% of the
E
Periodic
BOOL
If Periodic is FALSE, the cam
profile will be run just once. This
eliminates the need to disengage
the slave with Y_CamOut. When
Periodic is TRUE, the cam profile
will repeatuntil
FALSE
V
EngageData
Structure containing details
about how the cam will
engage. See EngageData details
below.
All zeros in
Y_Engage_Data
structure
VAR_OUTPUT
B
InSync
BOOL
Set high when the slave first synchronizes with the master.
This output is reset when execute goes low.
E
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable'
input, and reset if Done, CommandAborted, or Error is true.
E
Active
BOOL
For buffered modes, this output is set high at the moment
the block takes control of the axis. For non buffered modes,
the outputs Busy and Active have the same value.
E
CommandAborted
BOOL
Set high if motion is aborted by another motion command or
MC_Stop. This output is cleared with the same behavior as
the Done output.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or
'Enable' goes low.
E
ErrorID
UINT
If error is true, this output provides the Error ID. This output
is reset when 'Execute' or 'Enable' goes low.
E
EndOfProfile
BOOL
Pulsed output signaling the cyclic end of a CAM Profile