Yaskawa VS-626 MC5 User Manual
Page 136
6.3
Flux Vector Control
- 33
D
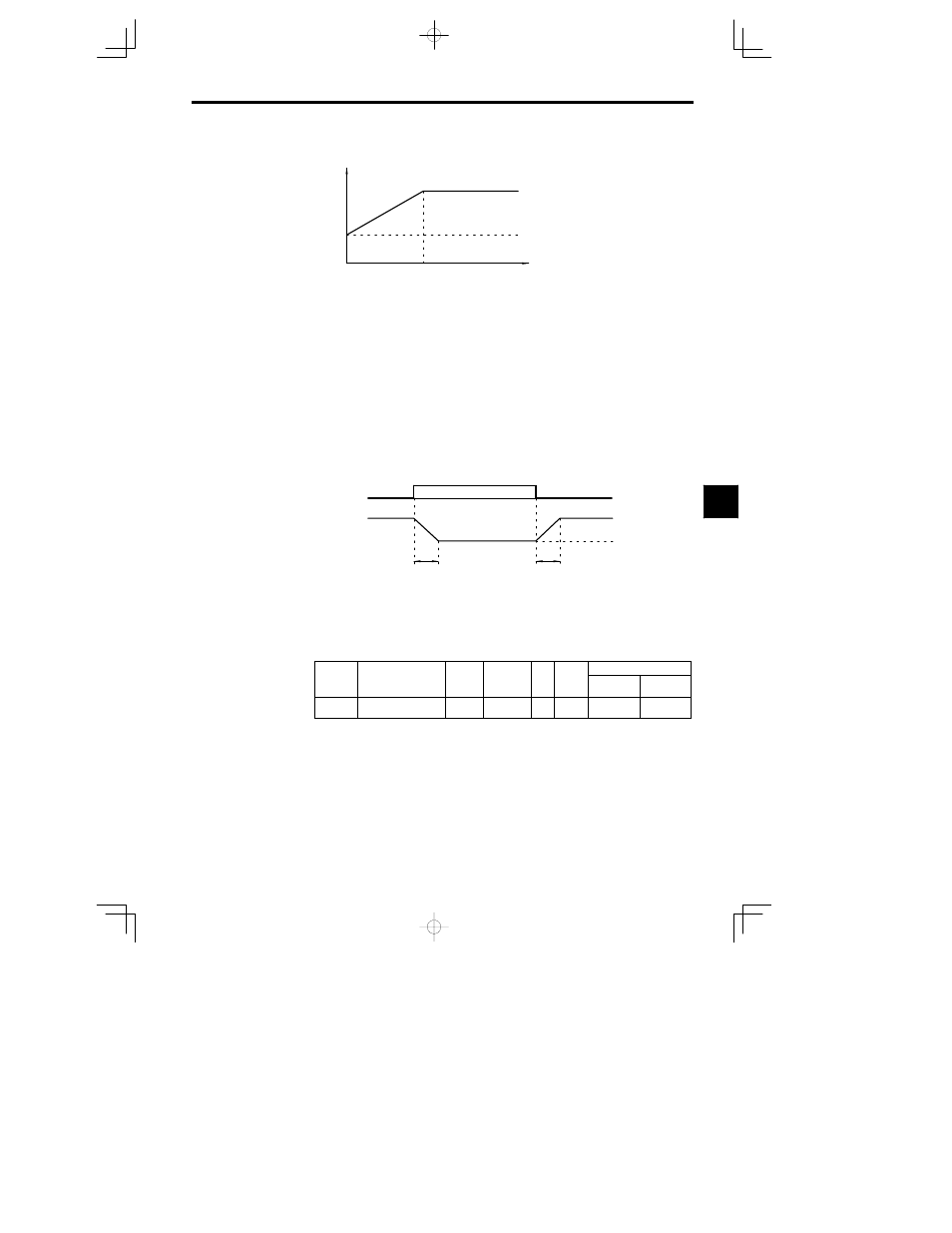
Figure 6.13 shows how the proportional gain and integral time approach the ASR proportional gain
2 and ASR integral time 2 linearly.
P
,
I
0
C5-07
Motor speed
(
Hz
)
P
=
C5-01
I
=
C5-02
P
=
C5-03
I
=
C5-04 (Low speed)
If C5-07 is set to 0.0, ASR proportional gain 1 and ASR integral
time 1 are used for the proportional gain and integral time at all
frequencies.
Fig
6.13
Gain Settings at Low Frequencies
J
Multi-function Input Settings: H1-01 Terminal 3 to H1-06 Terminal 8
ASR Integral Reset Setting: “E”
D
When one of the multi-function inputs is set to “E,” the input can be used to switch the speed control
loop between P control and PI control.
D
P control (integral reset) is used when the multi-function input is ON.
ASR Proportional Gain Switch Setting: “77”
D
When one of the multi-function inputs is set to “77,” the input can be used to switch between propor-
tional gain 1 and proportional gain 2.
D
Proportional gain 2 (C5-03) is used when the multi-function input is ON. This input has higher priority
than the ASR switching frequency set in C5-07.
ASR Gain Switch
signal (a multi-func-
tion input)
Proportional gain
(P)
ON
OFF
C5-02
Proportional gain
determined by mo-
tor speed.
C5-03 gain setting
C5-02
The gain is changed linearly in integral time 1 (C5-02). The integral
time setting isn’t switched.
Fig
6.14
ASR Proportional Gain Switch
J
Speed Control (ASR) Responsiveness: C5-06
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
during
Opera-
tion
Setting
Range
Unit
Factory
Setting
Open Loop
Vector
Flux Vector
C5-06
ASR primary delay time
0.000 to
0.500
s
0.004
A
D
Normally it isn’t necessary to make this adjustment.
D
Constant C5-06 can be used when adjusting the gain doesn’t remove motor oscillation, or adjusting
the gain removes oscillation but results in poor responsiveness.
D
A high C5-06 setting lowers the responsiveness of the speed control, but makes it difficult for oscilla-
tion to occur.
6