Yaskawa VS-626 MC5 User Manual
Page 285
Appendix
- 16
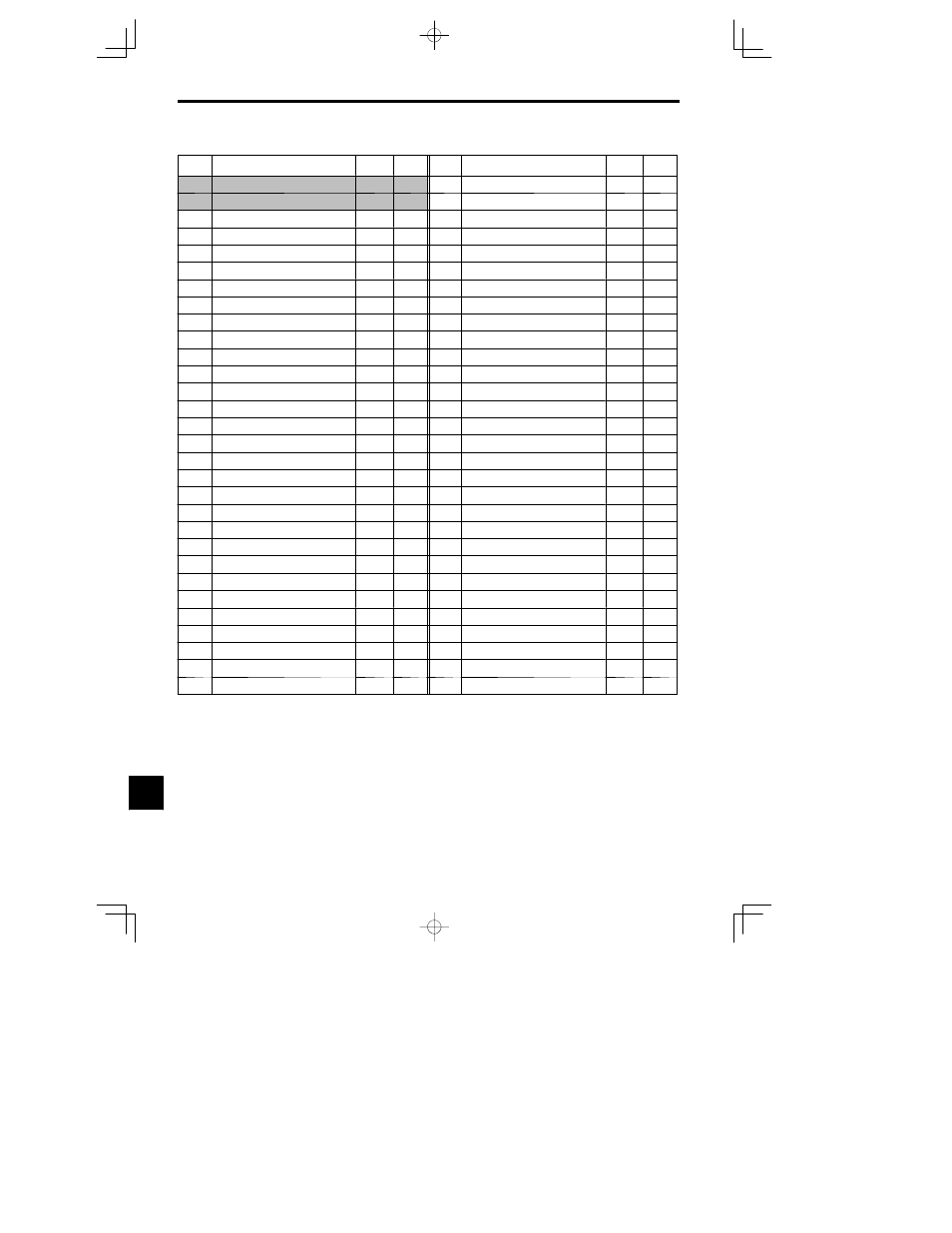
Table 12.1
User Constants (Continued)
No.
Name
(Display)
Factory
Setting
Setting
No.
Name
(Display)
Factory
Setting
Setting
C4--04
Start torque compensation (reverse direction)
(R TorqCmp @ Start)
0.0
d3-04
Jump frequency width
(Jump Bandwidth)
1.0
C4--05
Start torque time constant
(TorqCmp Delay T)
10
d4-01
-- --
4
0
C5-01
ASR proportional (P) gain 1
(ASR P Gain 1)
20.00
1
d4-02
-- --
4
25
C5-02
ASR integral (I) time 1
(ASR I Time 1)
0.500
1
E1-01
Input voltage setting
(Input Voltage)
200
5
C5-03
ASR proportional (P) gain 2
(ASR P Gain 2)
20.00
1
E1-02
Motor selection
(Motor Selection)
0
C5-04
ASR integral (I) time 2
(ASR I Time 2)
0.500
1
E1-03
V/f pattern selection
(V/F Selection)
0F
C5-05
ASR limit
(ASR Limit)
5.0
E1-04
Max. output frequency
(Max Frequency)
60.0
C5-06
ASR primary delay time
(ASR Delay Time)
0.004
E1-05
Max. voltage
(Max Voltage)
200.0
5
C5-07
ASR switching frequency
(ASR Gain SW Freq)
0.0
E1-06
Base frequency
(Base Frequency)
60.0
C5-0
8
ASR integral (I) limit
2
(ASR I Limit)
400
E1-07
Mid. output frequency
(Mid. Frequency A)
3.0
1
C6-01
Carrier frequency upper limit
(Carrier Freq Max)
15.0
3
E1-08
Mid. output frequency voltage
(Mid Voltage A)
11.0
1 5
C7-01
Hunting prevention selection
(Hunt Prev Select)
1
E1-09
Min. output frequency
(Min Frequency)
0.5
1
C7-02
Hunting prevention gain
(Hunt Prev Gain)
1.00
E1-10
Min. output frequency voltage
(Min Voltage)
2.0
1 5
C8-08
AFR gain
(AFR Gain)
1.00
E1-11
Mid. output frequency 2
2
(Mid Frequency B)
0.0
C8-09
Speed feedback detection control (AFR) time*
2
(AFR Time)
50
E1-12
Mid. output frequency voltage 2
2
Mid Voltage B)
0.0
C8-30
Carrier frequency during autotuning
2
(Carrier in tune)
2
E1-13
Base voltage
2
(Base Voltage)
0.0
d1-01
Frequency reference 1
(Reference 1)
0.00
E2-01
Motor rated current
(Motor Rated FLA)
1.90
3
d1-02
Frequency reference 2
(Reference 2)
0.00
E2-02
Motor rated slip
(Motor Rated Slip)
2.90
3
d1-03
Frequency reference 3
(Reference 3)
0.00
E2-03
Motor no-load current
(No-Load Current)
1.20
3
d1-04
Frequency reference 4
(Reference 4)
0.00
E2-04
Number of motor poles
(Number of Poles)
4
d1-05
Frequency reference 5
(Reference 5)
0.00
E2-05
Motor line-to-line resistance
(Term Resistance)
9.842
3
d1-06
Frequency reference 6
(Reference 6)
0.00
E2-06
Motor leak inductance
(Lead Inductance)
18.2
3
d1-07
Frequency reference 7
(Reference 7)
0.00
E2-07
Motor iron-core saturation coefficient 1
(Saturation Comp 1)
0.50
d1-08
Frequency reference 8
(Reference 8)
0.00
E2-08
Motor iron-core saturation coefficient 2
(Saturation Comp 2)
0.75
d1-09
Jog frequency reference
(Jog Reference)
6.00
E2-09
Motor mechanical loss
(Mechanical Loss)
0.0
d2-01
Frequency reference upper limit
(Ref Upper Limit)
100.0
E3-01
Motor 2 control method selection
2
(Control Method)
2
d2-02
Frequency reference lower limit
(Ref Lower Limit)
0.0
E4-01
Motor 2 max. output frequency
2
(V/F2 Max Freq)
60.0
d3-01
Jump frequency 1
(Jump Freq 1)
0.0
E4-02
Motor 2 max. voltage
2
(V/F2 Max Voltage)
200.0
5
d3-02
Jump frequency 2
(Jump Freq 2)
0.0
E4-03
Motor 2 max. voltage frequency 2
(V/F2 Base Freq)
60.0
d3-03
Jump frequency 3
(Jump Freq 3)
0.0
E4-04
Motor 2 mid. output frequency 1 2
(V/F2 Mid Freq)
3.0
* 1. Factory setting depends on the control method (A1-02).
* 2. Not displayed for some models depending on software version No.
* 3. Setting unit and initial setting depend on Inverter capacity.
* 4. Constants that cannot be used. (Do not change the settings)
* 5. Setting for 200 V class Inverters. For 400 V class Inverters, double the value.
12