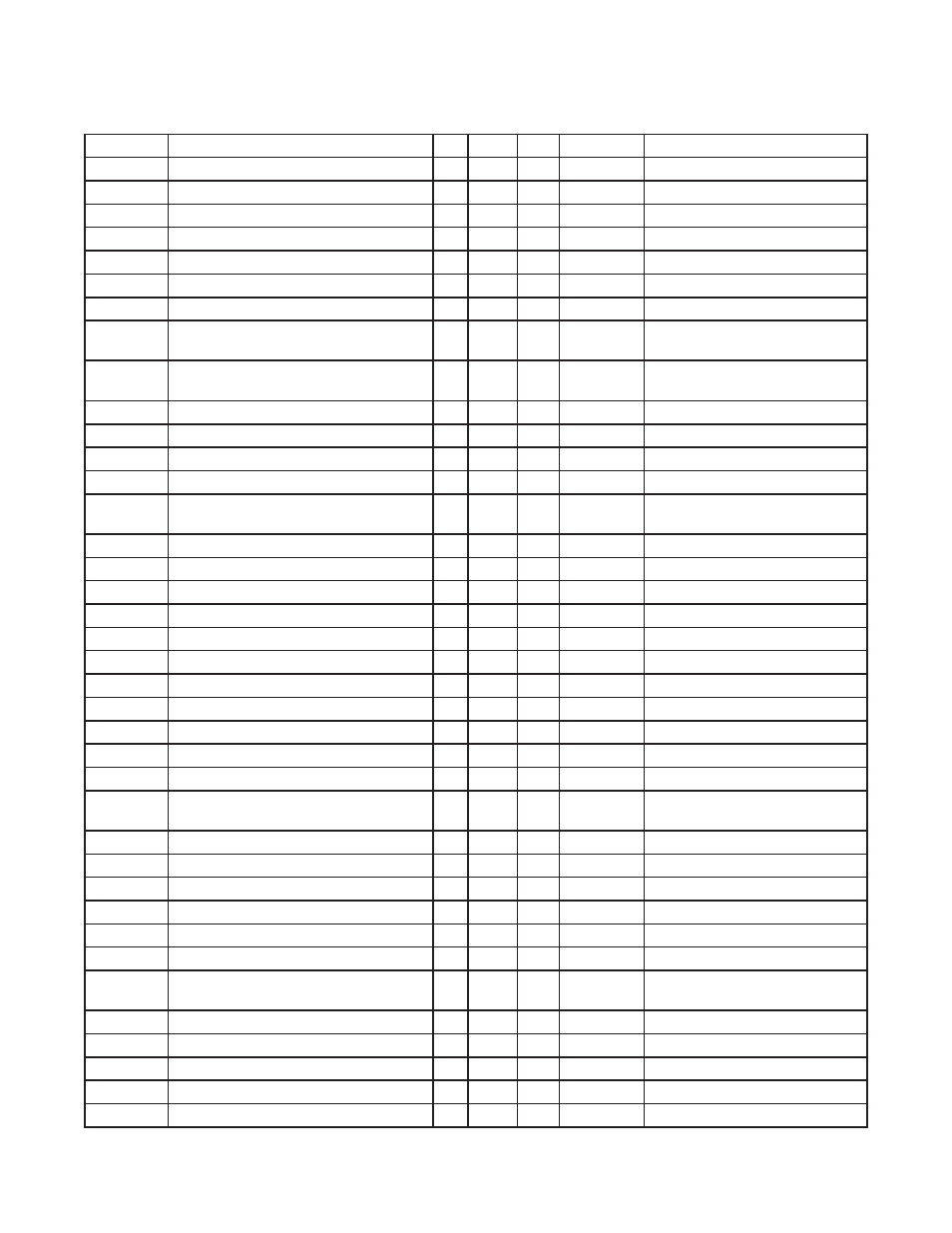
Configuration commands (continued) – Applied Motion RS-232 User Manual
Page 15
15
920-0002 Rev. I
2/2013
Host Command Reference
CF
Anti-resonance Filter Frequency
•
Stepper drives only
CG
Anti-resonance Filter Gain
•
Stepper drives only
CI
Change Idle Current
•
Stepper drives only
CM
Control mode
•
All drives
CP
Change peak current
•
Servo drives only
DA
Define Address
•
All drives
DL
Define Limits
•
All drives
DR
Data Register for Capture
•
Q servo drives only
ED
Encoder Direction
•
Servo drives, drives with encoder
feedback
ER
Encoder or Resolution
•
Servo drives, drives with encoder
feedback
HG
4th Harmonic Filter Gain
•
Stepper drives only
HP
4th Harmonic Filter Phase
•
Stepper drives only
IA
Immediate Analog
•
•
All drives
ID
immediate Distance
•
•
All drives
IE
Immediate Encoder
•
•
Servo drives, drives with encoder
feedback
IF
Immediate Format
•
•
All drives
IQ
Immediate Current
•
•
Servo drives only
IP
Immediate Position
•
•
All drives
IT
Immediate Temperature
•
•
All drives
IU
Immediate Voltage
•
•
All drives
IV
Immediate Velocity
•
•
All drives
LV
Low Voltage Threshold
•
All drives
MD
Motor Disable
•
All drives
ME
Motor Enable
•
All drives
MN
Model Number
•
•
All drives
MO
Motion Output
•
All drives
MR
Microstep Resolution
•
All drives (deprecated - see EG
command)
MV
Model & Revision
•
•
All drives except Blu servos
OF
On Fault
•
Q drives only
OI
On Input
•
Q drives only
OP
Option Board
•
•
•
All drives
PA
Power-up Acceleration Current
•
PC
Power up Current
•
All drives
PF
Position Fault
•
Servo drives, drives with encoder
feedback
PI
Power up Idle Current
•
Stepper drives only
PL
In Position Limit
•
Servo drives only
PM
Power up Mode
•
All drives
PP
Power up peak current
•
Servo drives only
PW
Pass Word
•
Q drives only
Configuration Commands (continued)