Applied Motion RS-232 User Manual
Page 298
298
920-0002 Rev. I
2/2013
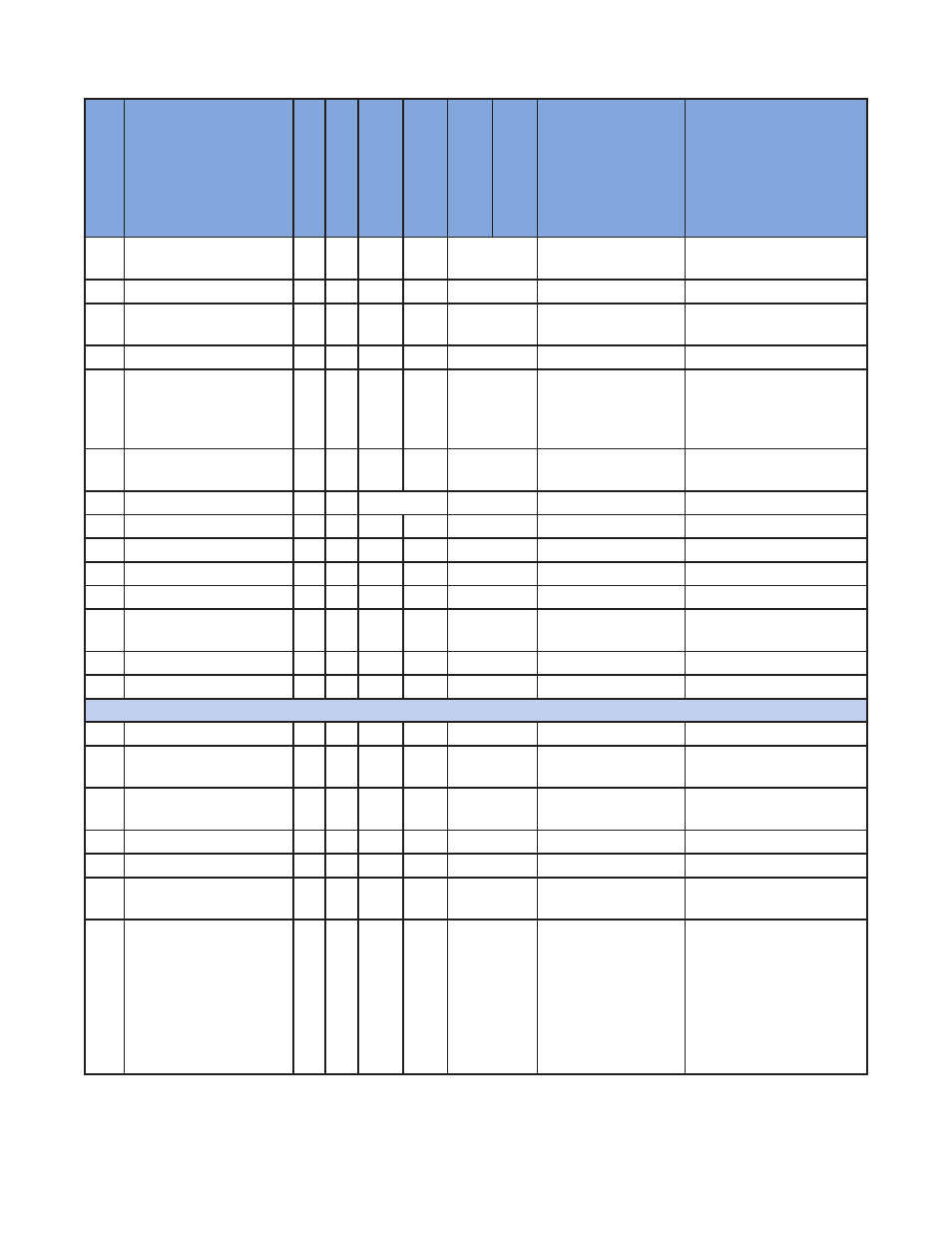
Host Command Reference
Command
Description
opcode (hex)
Reg code
Parameter 1
Parameter 2
Parameter 3
Parameter 4
Range ST5 /
ST10 / ST
AC5
Units
CC
Running CURRENT
18 0
motor current
when running
500 / 1000 / 500
.01 amps
CD
IDLE_CURRENT_DELAY,
4F 0
delay time
1..32000
msec
CI
IDLE CURRENT
19 0
motor current
when idle
500 / 1000 / 500
.01 amps
CM
CONTROL_MODE,
10 0
mode code
7, 10..18, 21, 22
EF
Encoder Function
D6 0
function code 0,1,2 or 4
0 = Encoder function off
1 = Stall detection
2 = Stall prevention
4 = Stall prevention w/ time-out
ER
ENCODER_RESOLUTION,
20 0
encoder line
count
50..32000
lines/rev (counts/rev/4)
FI
Filter Input
C0 io
filter value
0..32767
CPU cycles
FX
Filter Select Inputs
D3 0
input bank
0 or 1
1=IN/OUT1, 0=IN/OUT2
HG
harmonic smoothing gain
4
0
gain
0..32000
HP
harmonic smoothing phase
5
0
phase
+/-255
PA
PU_ACCEL_CURRENT
D7 0
current
STM only
.01 amps
PF
POSITION_FAULT,
21 0
posn fault
limit
1..32000
encoder counts
PM
OPERATION_MODE,
44 0
mode code
2 or 7
SF
STEP_FILTER_FREQUENCY, 6
0
freq
100..25000
0.1 Hz
I/O Commands
AD
ANALOG_DEADBAND
D2 0
deadband
0..255
mV
AF
ANALOG_FILTER_GAIN,
4C 0
freq
0..32000
Filter value = 72090 / [ (1400 /
Hz ) + 2.2 ]. O=no filter
AG
ANALOG_VELOCITY_GAIN, 3B 0
speed at full
scale
+/-32000
.25 rpm
AI
ALARM_RESET INPUT
46 0
state
1..3
AO
FAULT OUTPUT
47 0
state
1..3
AP
ANALOG_POSITION_GAIN, 4B 0
posn at full
scale
1..32000
steps
AS
ANALOG_SCALING
D1 0
input range
0..7
0 = single-ended +/- 10 volts
1 = single-ended 0 - 10 volts
2 = single-ended +/- 5 volts
3 = single-ended 0 - 5 volts
4 = differential +/- 10 volts
5 = differential 0 - 10 volts
6 = differential +/- 5 volts
7 = differential 0 - 5 volts