Applied Motion RS-232 User Manual
Page 309
309
920-0002 Rev. I
2/2013
Host Command Reference
Communicating with a Q Program While It’s Running
You can use Type 2 commands to read and write registers while a Q program is running. The Q program
can send information to the host by changing a register that the host is polling. Registers 0 - 9 can be polled
using the Type 2 User Register Read command (opcode 9A).
The host can make changes to the Q program operation by writing to parameters that the program uses. For
example, you could change the motor speed sending a parameter write message that alters VE (Type 2 message,
opcode 83, operand 1D). The speed change will take effect on the next move.
Changes that affect a Q program immediately can be made using the Write Q Register command (message
type 2, opcode 9E). For example, if the motor is jogging after having been sent a CJ command, writing to register
J will result in an immediate speed change. Please note that Q register writes are not range checked, so be
careful before you write.
How to Know if a Q Program Has Stopped
Since a Q program can be launched and allowed to stop itself when it encounters a blank line, you may want
to know when it stops. You can do this by polling for the status word and observing bit 14. This bit is a one if the
program is executing. To fetch the status word, use the Type 2 Parameter Read command with operand 0x80 as
shown below.
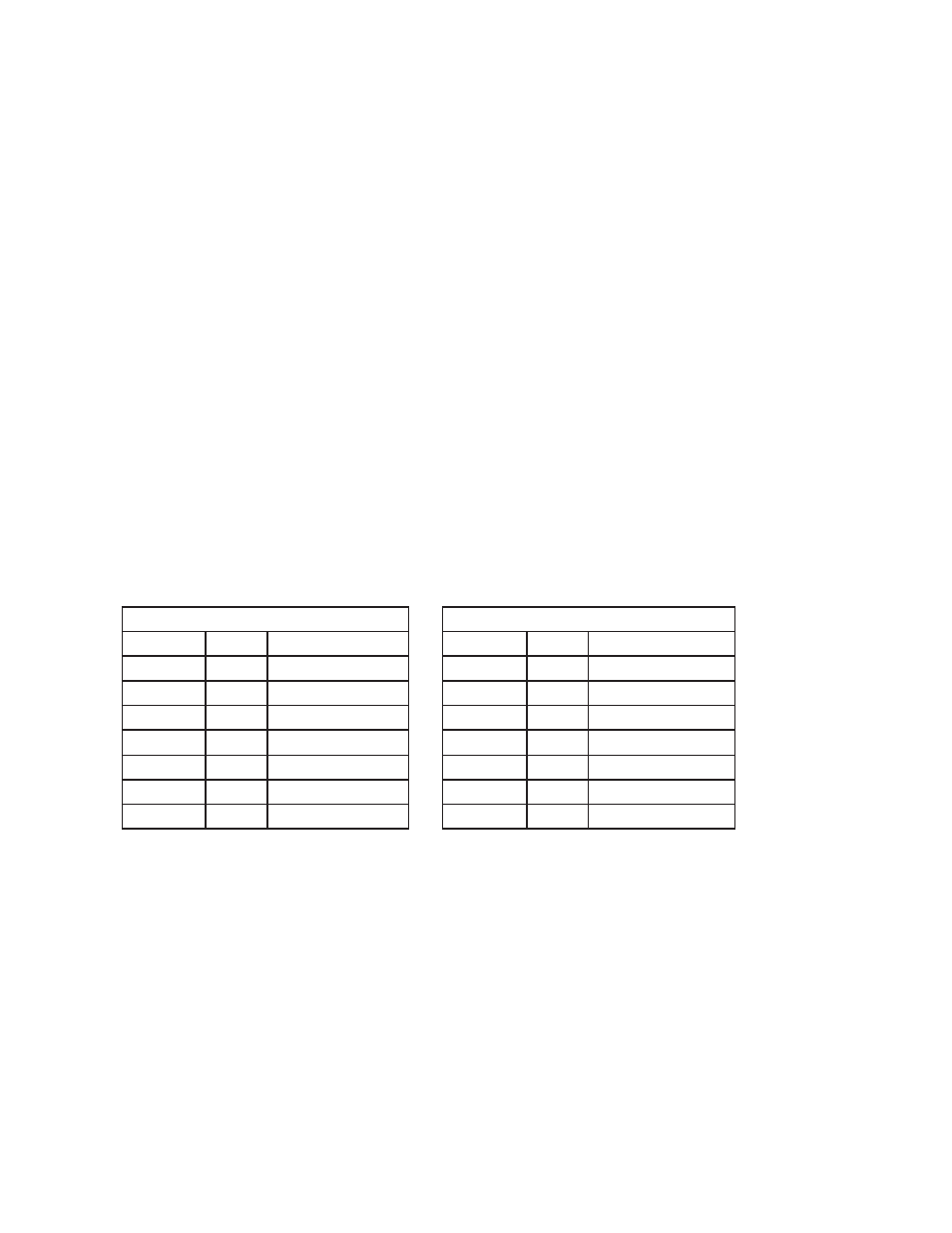
Example: Checking Status While a Q Program is Running
opcode
0x84 parameter read, from Table 2
operand 0x80 status code, from Table 3
Type 2 Command Message Payload
Type 2 Response Message Payload
byte 0
0
reserved
byte 0
0
reserved
byte 1
2
message type
byte 1
2
message type
byte 2
84
opcode
byte 2
84
opcode
byte 3
80
operand
byte 3
80
operand
byte 4
0
not used
byte 4
?
status code MSB
byte 5
0
not used
byte 5
?
status code LSB
byte 6
0
not used
byte 6
0
not used
byte 7
0
not used
byte 7
0
not used
Typical return values:
0001
Motor enabled, Q program not running
4001
Motor enabled, Q program running
4801
Motor enabled, Q running, Wait Time command executing
4019
Motor enabled, motor moving, Q running
For more information about the status code, please read about the SC command in the main part of this
manual.