Motor performance fine-tuning, Fine-tuning v/f control, Fine-tuning open loop vector control for pm motors – Yaskawa Z1000 AC Drive HVAC User Manual
Page 192: 2 motor performance fine-tuning
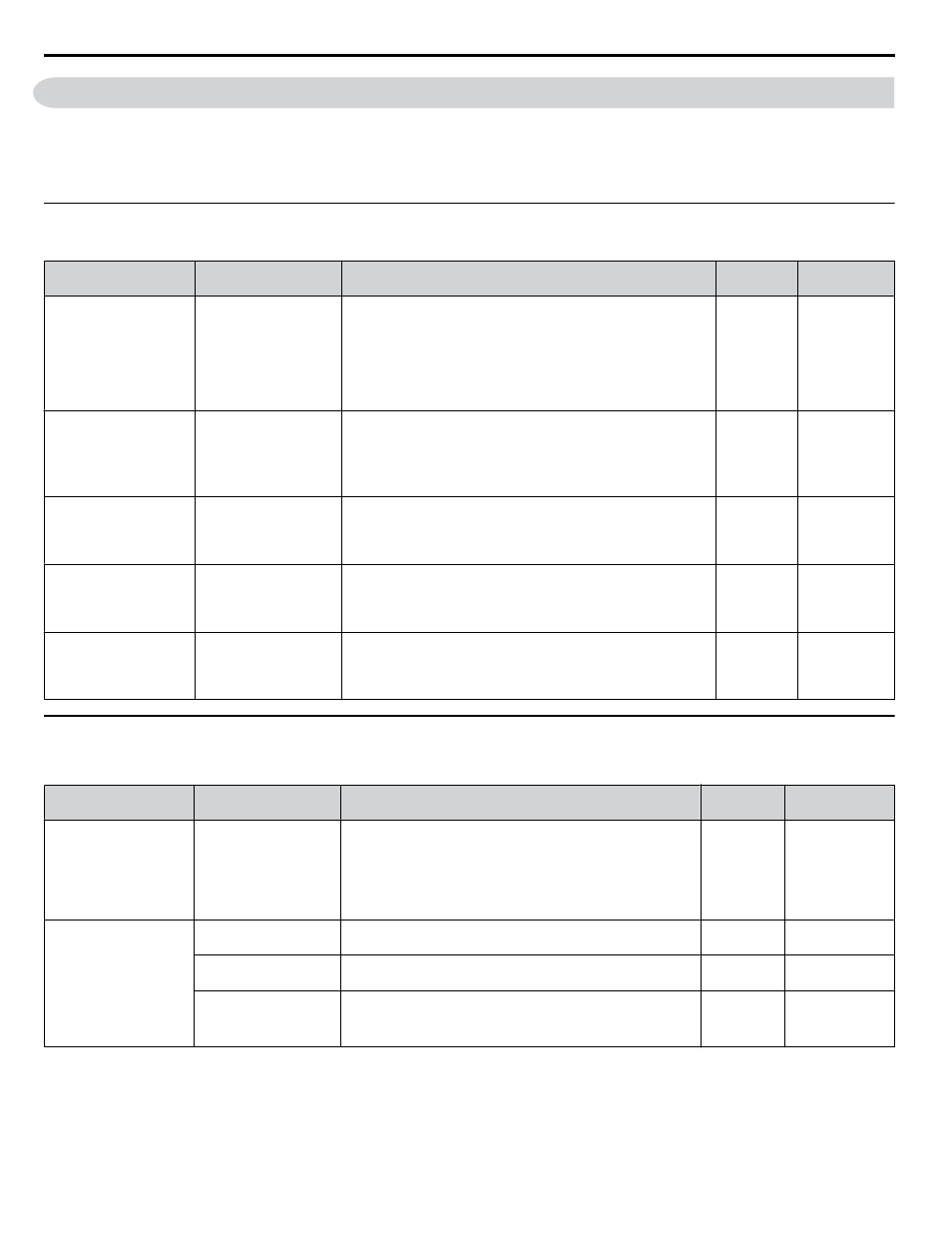
5.2 Motor Performance Fine-Tuning
This section offers helpful information for counteracting oscillation, hunting, and other problems that occur while performing
a trial run. Refer to the section below that corresponds to the motor control method used.
Note:
This section describes commonly edited parameters that may be set incorrectly. Consult Yaskawa for more information on detailed settings
and for fine-tuning the drive.
u
Fine-Tuning V/f Control
Table 5.1 Parameters for Fine-Tuning Performance in V/f
Problem
Parameter No.
Corrective Action
Default
Suggested
Setting
Motor hunting and
oscillation at speeds
between 10 and 40 Hz
Hunting Prevention Gain
(n1-02)
• Reduce the setting if insufficient motor torque relative to the size
of the load causes hunting.
• Increase the setting when motor hunting and oscillation occur
with a light load.
• Reduce the setting if hunting occurs when using a motor with a
relatively low inductance, such as a high-frequency motor or a
motor with a larger frame size.
1.00
0.10 to 2.00
• Motor noise
• Motor hunting and
oscillation at speeds up
to 40 Hz
Carrier Frequency
Selection (C6-02)
• Increase the carrier frequency If the motor noise is too loud.
• Lower the carrier frequency when motor hunting and oscillation
occur at speeds up to 40 Hz.
• The default setting for the carrier frequency depends on the drive
capacity (o2-04).
1 (2 kHz)
1 to max. setting
• Poor torque or speed
response
• Motor hunting and
oscillation
Torque Compensation
Primary Delay Time
(C4-02)
• Reduce the setting if motor torque and speed response are too
slow.
• Increase the setting if motor hunting and oscillation occur.
Depends on
o2-04, Drive
Model
Selection
100 to 1000 ms
• Poor motor torque at
speeds below 10 Hz
• Motor hunting and
oscillation
Torque Compensation
Gain (C4-01)
• Increase the setting if motor torque is insufficient at speeds
below 10 Hz.
• Reduce the setting if motor hunting and oscillation with a
relatively light load.
1.00
0.50 to 1.50
• Poor motor torque at
low speeds
• Motor instability at
motor start
Mid Output Voltage A
(E1-08)
Minimum Output
Voltage (E1-10)
• Increase the setting if motor torque is insufficient at speeds
below 10 Hz.
• Reduce the setting If motor instability occurs at motor start.
Depends on
A1-02,
E1-03, and
o2-04
Default setting
±5 V
u
Fine-Tuning Open Loop Vector Control for PM Motors
Table 5.2 Parameters for Fine-Tuning Performance in OLV/PM
Problem
Parameter No.
Corrective Action
Default
Suggested
Setting
Undesirable motor
performance
Motor parameters
(E1-, E5-)
• Check the settings for base and maximum frequency in the
E1- parameters.
• Check E5- parameters and set motor data correctly. Do
not enter line-to-line data where single-phase data is required,
and vice versa.
• Perform Auto-Tuning.
-
-
Poor motor torque and
speed response
Load Inertia Ratio
(n8-55)
Adjust parameter n8-55 to meet the load inertia ratio of the
machine.
0
Close to the actual
load inertia ratio
Speed Feedback
Detection Gain (n8-45)
Increase the speed feedback detection gain (n8-45).
0.80
Increase in
increments of 0.05
Torque Compensation
(C4-01)
Enable torque compensation.
Note:
Setting this value too high can cause
overcompensation and motor oscillation.
0.00
1.00
5.2 Motor Performance Fine-Tuning
192
YASKAWA ELECTRIC TOEP YAIZ1U 03A YASKAWA AC Drive – Z1000 User Manual