Yaskawa Z1000 AC Drive HVAC User Manual
Page 193
Problem
Parameter No.
Corrective Action
Default
Suggested
Setting
Oscillation at start or the
motor stalls
Pull-In Current during
Accel/Decel (n8-51)
Increase the pull-in current in n8-51
50%
Increase in steps
of 5%
DC Injection Braking
Current (b2-02), DC
Injection Time at Start
(b2-03)
Use DC Injection Braking at start to align the rotor. This may
cause a short reverse rotation at start.
b2-02 = 50%
b2-03 = 0.00 s
b2-03 = 0.5 s
Increase b2-02 if
needed
Load Inertia Ratio
(n8-55)
Increase the load inertia ratio.
Note:
Setting this value too high can cause
overcompensation and motor oscillation.
0
Close to the actual
load inertia ratio
Stalling or oscillation
occur when load is
applied during constant
speed
Pull-In Current
Compensation Time
Constant (n8-47)
Reduce n8-47 if hunting occurs during constant speed
5.0 s
Reduce in
increments
of 0.2 s
Pull-In Current (n8-48)
Increase the pull-in current in n8-48.
30%
Increase in
increments of 5%
Load Inertia Ratio
(n8-55)
Increase the load inertia ratio.
0
Close to the actual
load inertia ratio
Hunting or oscillation
occur
Speed feedback
Detection Gain (n8-45)
Reduce the speed feedback detection gain in n8-45.
0.80
Increase in
increments 0.05
STo fault trips when the
load is not excessively
high
Induced Voltage
Constant
(E5-09 or E5-24)
• Check and adjust the induced voltage constant.
• Check the motor nameplate and the data sheet or contact the
motor manufacturer.
Depends on
drive
capacity
Refer to the motor
data sheet or the
nameplate.
Stalling or STo occurs at
high speed as the output
voltage becomes
saturated
Output Voltage Limit
(n8-62)
Set the value of the input voltage to parameter n8-62
600 Vac
(600 V class)
Set equal to input
voltage
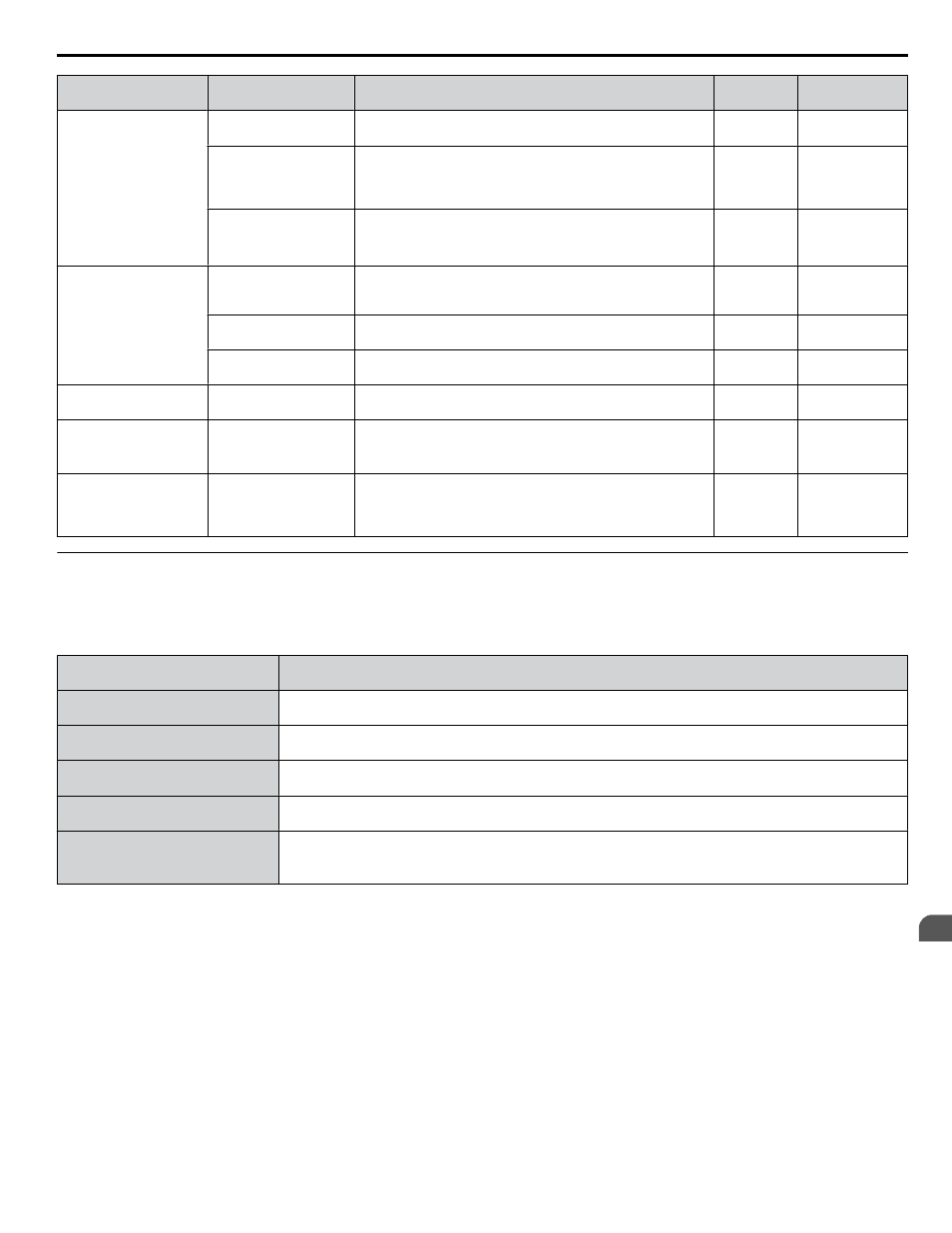
u
Parameters to Minimize Motor Hunting and Oscillation
In addition to the parameters discussed on pages
and
indirectly affect motor hunting and
oscillation.
Table 5.3 Parameters that Affect Control Performance in Applications
Name
(Parameter No.)
Application
Accel/Decel Time
(C1-01 through C1-11)
Adjusting accel and decel times will affect the torque presented to the motor during acceleration or deceleration.
S-Curve Characteristics
(C2-01 and C2-02)
Prevents shock at the beginning and end of acceleration and deceleration.
Jump Frequency
(d3-01 through d3-04)
Skips over the resonant frequencies of connected machinery.
Analog Filter Time Constant
(H3-13)
Prevents fluctuation in the analog input signal due to noise.
Stall Prevention
(L3-01 through L3-06, L3-11)
• Prevents motor speed loss and overvoltage when the load is too heavy or during sudden acceleration/
deceleration.
• Adjustment is not normally necessary because Stall Prevention is enabled as a default.
5.2 Motor Performance Fine-Tuning
YASKAWA ELECTRIC TOEP YAIZ1U 03A YASKAWA AC Drive – Z1000 User Manual
193
5
Troubleshooting