Fine-tuning pid, 2 b: application – Yaskawa Z1000U HVAC Matrix Bypass User Manual
Page 152
Setting 1: Reverse Enabled
Negative PID output will cause the drive to run in the opposite direction.
n
Fine-Tuning PID
Follow the directions below to fine tune PID control parameters:
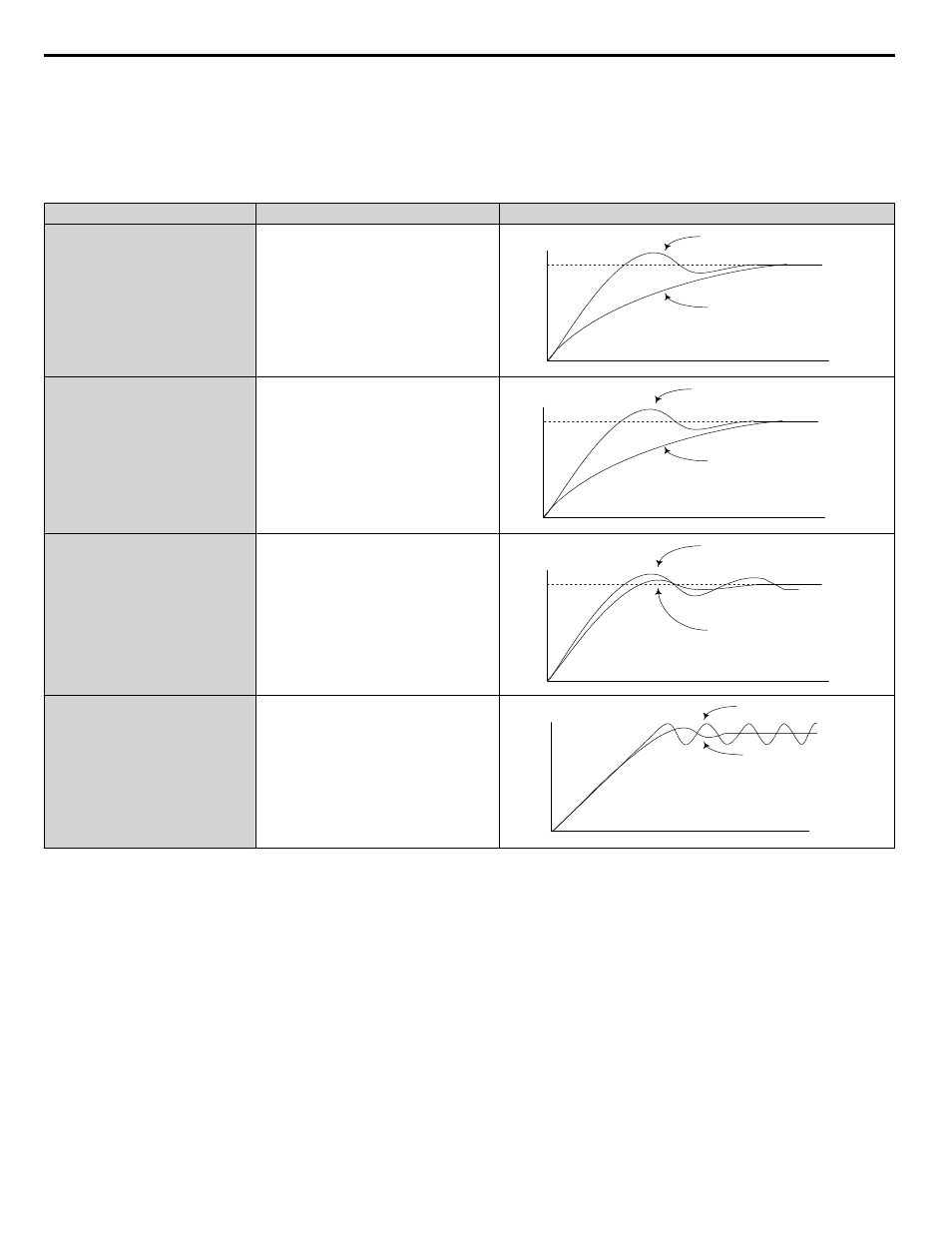
Table 5.6 PID Fine Tuning
Goal
Tuning Procedure
Result
Suppress overshoot
• Reduce the derivative time (b5-05)
• Increase the integral time (b5-03)
Response
Before adjustment
After adjustment
Time
Achieve stability quickly while
allowing some overshoot
• Decrease the integral time (b5-03)
• Increase the derivative time (b5-05)
Response
Before adjustment
After adjustment
Time
Suppress long cycle oscillations
(longer than the integral time setting) Increase the integral time (b5-03)
Response
Before adjustment
After adjustment
Time
Suppress short cycle oscillations
• If oscillation cycle time is close to the
derivative time, reduce the derivative
time (b5-05).
• If the derivative time is set to 0.00 s and
oscillations are still a problem, reduce
the proportional gain (b5-02) or increase
the PID primary delay time (b5-08)
Response
Before adjustment
After adjustment
Time
5.2 b: Application
152
YASKAWA SIEP YAIZ1D 01A Z1000U HVAC MATRIX Drive Bypass Technical Manual