2 control modes, 1 overview of control modes – Yaskawa MP920 User's Manual Design User Manual
Page 122
4 Motion Control
4.2.1 Overview of Control Modes
4-8
4.2
Control Modes
This section describes the motion control modes that can be used by the MP920.
4.2.1
Overview of Control Modes
Five control modes are available for MP920 Motion Modules. These modes can be switched
in real time, according to the purpose.
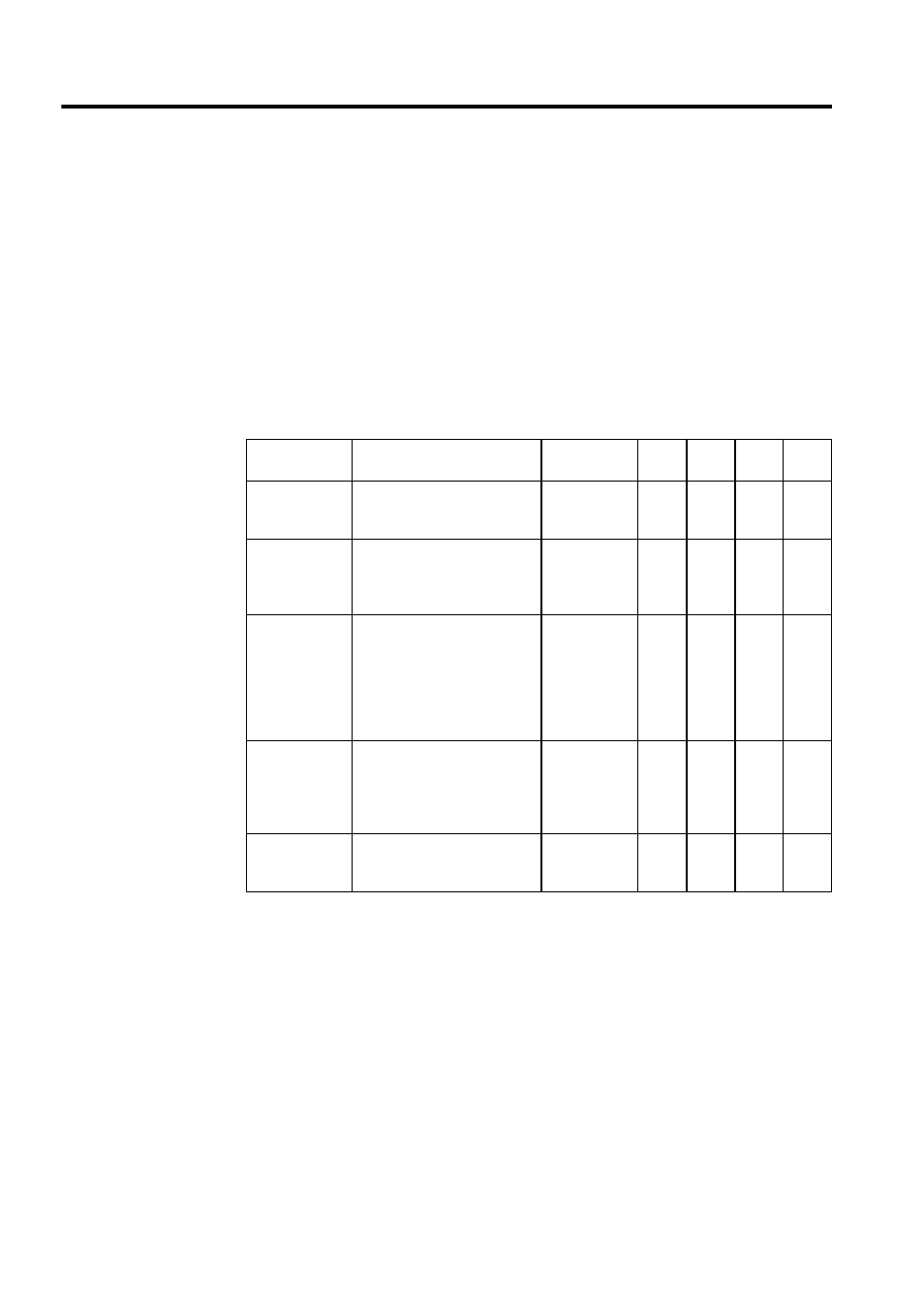
The following table shows the control mode that can be used by MP920 Motion Modules,
and gives an overview and some examples of their uses.
* There are two methods for returning to the zero point:
• Using ZERO POINT RETURN command for position control
• Using Zero Return Mode
Control Mode
Overview
Typical
Applications
SVA1 SVA2
SVB
PO01
Speed
Reference
Output Mode
Rotates the motor at the speci-
fied speed.
Conveyors or
main axes
Yes
Yes
No
No
Torque
Reference
Output Mode
Outputs the specified torque.
Injection
molding
machines or
presses
No
Yes
No
No
Position
Control Mode*
Specifies the target position
and speed. Executes a position
loop, identifies the difference
to the target position from the
encoder, converts the differ-
ence to the speed reference,
and performs position control.
Conveyors or
XY tables
Yes
Yes
Yes
Yes
Phase
Control Mode
While executing speed control
using a standard speed refer-
ence, generates the target posi-
tion from the speed reference,
and performs phase control.
Electronic
cams or elec-
tronic shafts
Yes
Yes
No
No
Zero Return
Mode*
Performs zero point positioning
when an incremental encoder is
used.
−
Yes
Yes
No
No