Yaskawa MP920 User's Manual Design User Manual
Page 543
Appendix A
A.3.2 Motion Setting Parameters
A-28
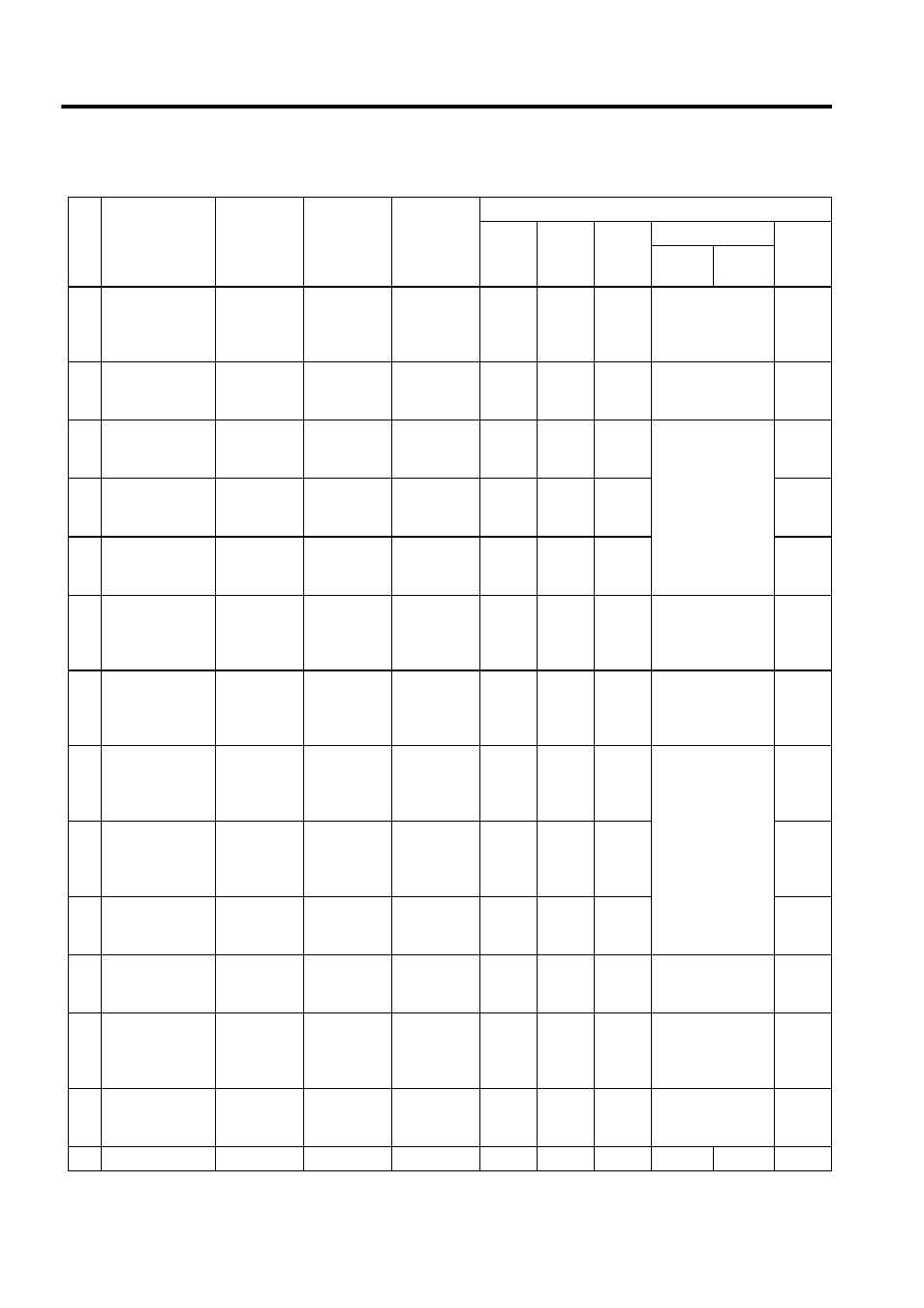
15 Positioning
Completed
Range Setting
(PEXT)
OW0E
0 to 65535
(Default =
10)
1 = 1 pulse
or
1 = 1 refer-
ence unit
100
−
−
10
−
16 Error Count
Alarm Detection
Setting (EOV)
OW0F
0 to 65535
(Default =
65535)
1 = 1 pulse
65535
−
−
65535
65535
17 Position Loop
Gain Setting
(Kp)
OW10
1 to 32767
(Default =
300)
1 = 0.1 /s
500
(50.0)
−
−
Set an appropriate
value.
−
18 Feed Forward
Gain Setting
(Kf)
OW11
0 to 200
(Default = 0)
1 = 1%
(10 = 10%)
−
−
−
−
19 Position
Reference
Setting (XREF)
OL12
0 to
±2
31
-1
(Default = 0)
1 = 1 pulse
or 1 refer-
ence unit
−
−
−
−
21 Filter Time
Constant Setting
(NNUM)
OW14
0 to 255 or
0 to 32767
(Default = 0)
1 = 1 time or
1 ms
(0 or 1 = No
averaging)
−
0
−
0
−
22 Speed
Reference
Setting
(NREF)
OW15
0 to
±32767
(Default = 0)
1 = 0.01%
−
10000
(100%)
−
10000 (100%)
10000
(100%)
23 Phase Bias
Setting
(PHBIAS)
OL16
0 to
±2
31
-1
(Default = 0)
1 = 1 pulse
−
−
−
−
Set an
appro-
priate
value.
25 Speed
Compensation
Setting
(NCOM)
OW18
0 to
±32767
(Default = 0)
1 = 0.01%
−
−
−
26 Proportional
Gain Setting
(Kv)
OW19
0 to
±32767
(Default =
300)
1 = 0.1 /s
−
−
−
−
27 Integral Time
Setting
(Ti)
OW1A
0 to
±32767
(Default = 0)
1 = 1 ms
(0 = No inte-
gration)
−
−
−
−
300
(300
ms)
28 Torque
Reference
Setting
(TREF)
OW1B
0 to
±32767
(Default = 0)
1 = 0.01%
−
−
10000
(100%)
−
−
29 Speed Limit
Setting
(NLIM)
OW1C
0 to
±32767
(Default =
15000)
1 = 0.01%
−
−
10000
(100%)
−
−
30 Not used
OW1D
-
-
−
−
−
−
−
−
(cont’d)
No.
Name
Register
Number
Setting
Range
Meaning
Basic Counter
Zero
Point
Return
Speed
Torque
Position
Phase
Position
1
Position
2