Reference unit – Yaskawa MP920 User's Manual Design User Manual
Page 142
4 Motion Control
4.3.1 Prerequisites for Position Control
4-28
When using a motion program, the bit 14 of OW01 (Position Reference Type) must be set to 1
(Incremental Addition Mode).
The default setting is 1 (Incremental Addition Mode).
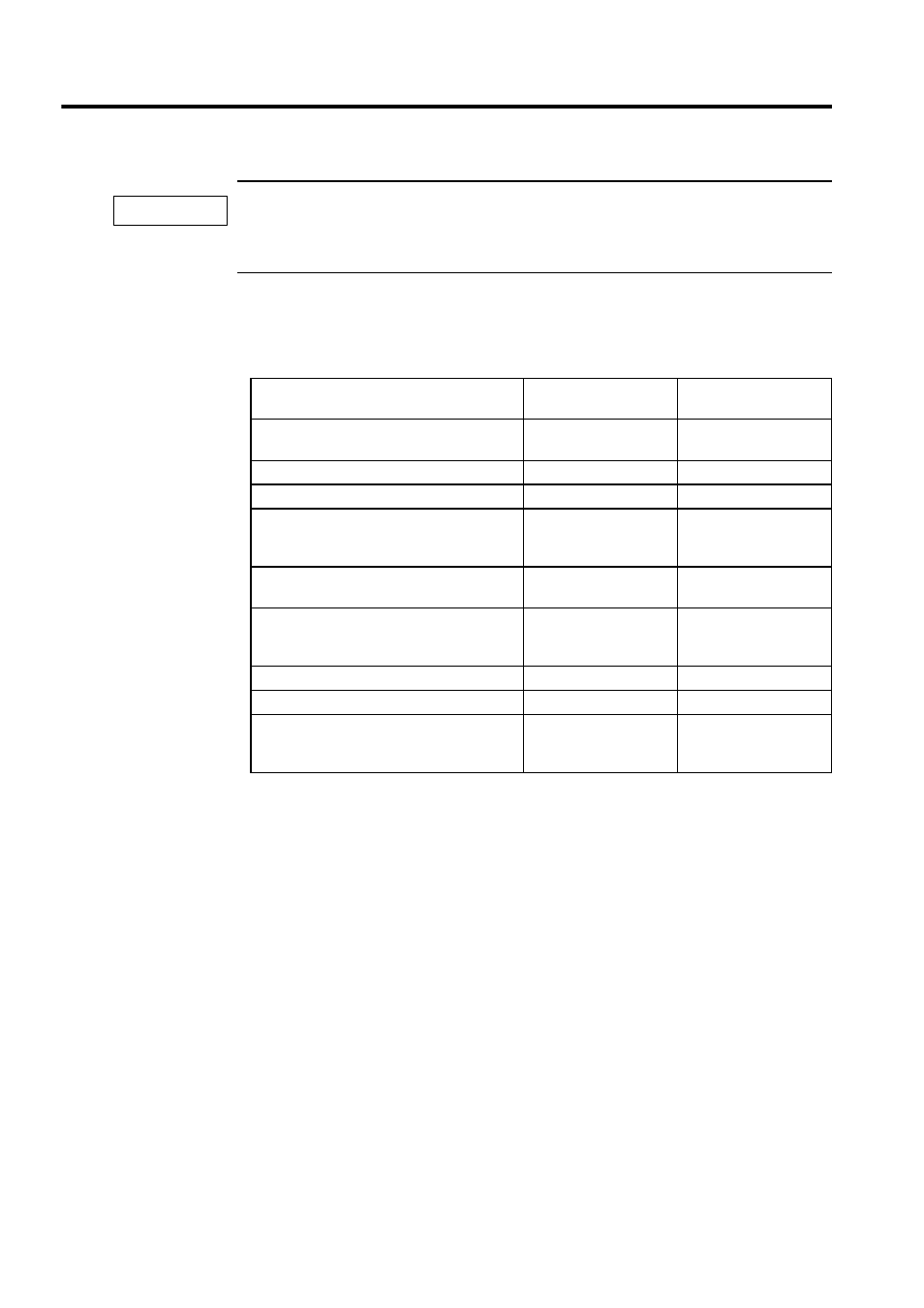
Table 4.8 shows the differences when motion commands (OW20) are used, and when no
motion command is used.
The meaning of the terms used in the above table and their method of application are dis-
cussed below.
Reference Unit
The reference units input to the Module are set with the following motion fixed parameter
settings.
Pulses, millimeters, degrees, or inches can be used as the reference unit. The reference unit is
specified in bits 0 to 3 of motion fixed parameter No. 17 (Motion Controller Function Selec-
tion Flags).
The minimum reference unit that can be specified in the Module is determined by the above
unit settings and the setting of motion fixed parameter No. 18 (Number of Digits Below Dec-
imal Point).
When motion commands (OW20) are not used, the unit will be the pulse.
Table 4.8 Differences When Motion Commands are Used/Not Used
Item
Motion Commands
(OW20) Not Used
Motion Commands
(OW20) Used
Reference Unit
Pulse
Pulse, mm, inch, or deg
can be selected.
Electronic Gear Function
Not possible
Possible
Finite length position control
Possible
Possible
Infinite length position control that rotates
the axis in one direction only, without re-
setting after one rotation
Possible
Possible
Infinite length position control that resets
the axis after one rotation
Not possible
Possible
Position reference
Absolute position mode
Absolute position mode
or incremental addition
mode can be selected.
Position buffer
Not possible
Possible
Position monitor
Pulse unit
Reference unit
Speed reference
Percentage (%) reference The percentage (%) ref-
erence or the reference
unit can be selected.
IMPORTANT