Yaskawa MP920 User's Manual Design User Manual
Page 138
4 Motion Control
4.2.5 Zero Return Mode
4-24
* Valid only with an SVA-02A Module.
In the example, the SERVOPACK is used as axis 1 of Module No. 1. When the Module
number and the axis number are different, see 7.1.2 Module Numbers and Motion
Parameter Register Numbers, and change the register number.
3. Set the Zero Return Mode (ZRN) to ON (bit 4 of OW00).
4. Set the Servo ON (RUN) to ON (bit 0 of OW01).
a) The axis will be moved in the direction specified by the Zero Point Return Direction
Selection ZRNDIR (bit 9 of OW00).
b) When the Zero Point Return Deceleration Point Limit Switch LSDEC (bit F of
OW01) turns ON, the axis is decelerated to creep speed.
A user program must be created to connect the Limit Switch Signal DECLS (the DI signal included in
the LIO-01 Module) to the Zero Point Return Deceleration Point Limit Switch LSDEC (bit F of
OW01).
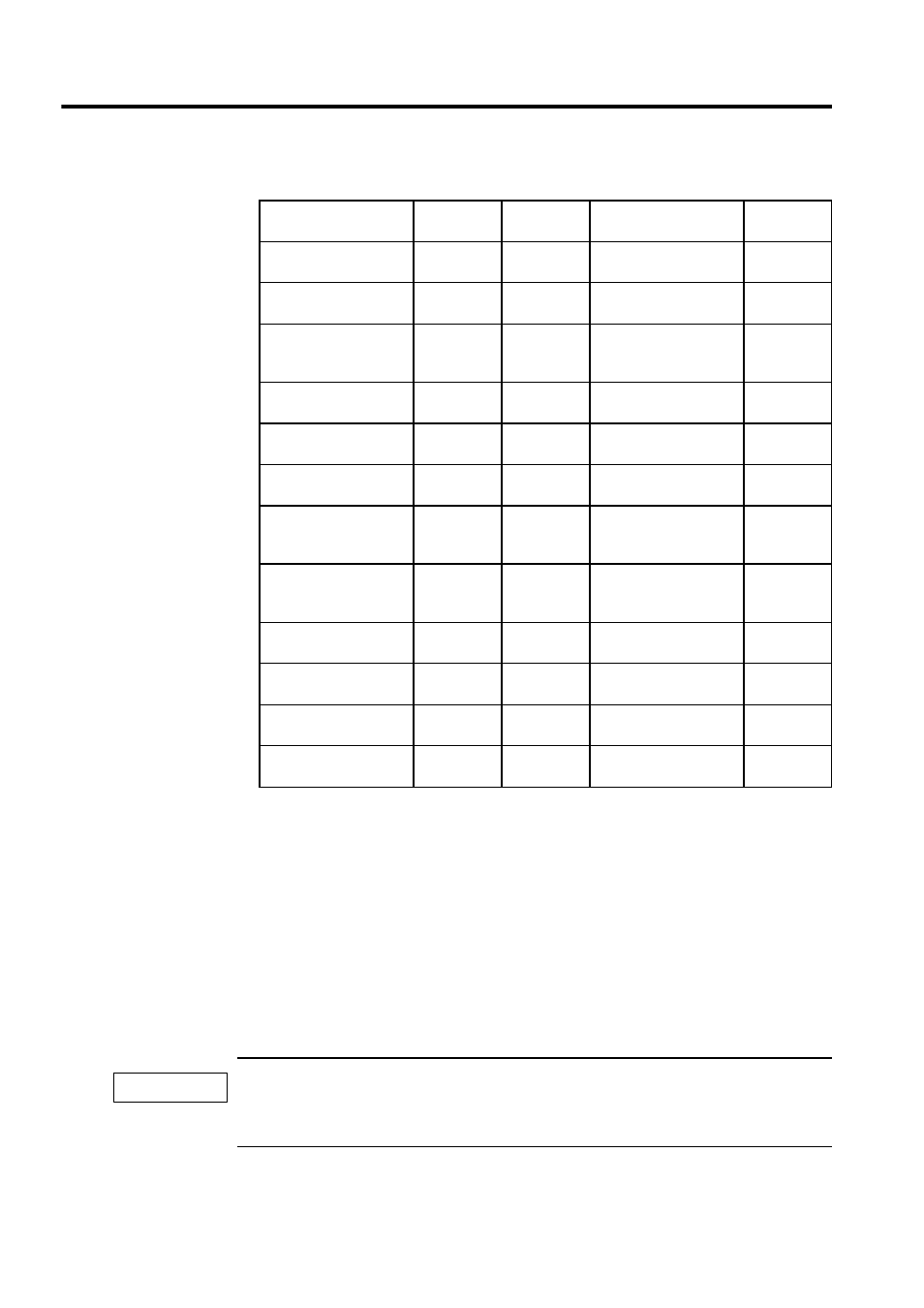
Table 4.7 Examples of Setting Parameters
Name
Register
No.
Setting
Range
Meaning
Setting
Example
Positive Torque Limit
Setting (TLIMP)*
OW02
-32768 to
32767
1 = 0.01%
-10000
(-100.00%)
Positive Speed Limiter
Setting (NLIMP)
OW04
0 to 32767
1 = 0.01%
13000
(130.00%)
Negative Speed
Limiter Setting
(NLIMN)
OW05
0 to 32767
1 = 0.01%
13000
(130.00%)
Zero Point Offset
(ABSOFF)
OL06
-2
31
to 2
31
-1
1 = 1 reference unit
With pulse: 1 = 1 pulse
100 pulses
Approach Speed
Setting (NAPR)
OW0A
0 to 32767
Value (%) for rated
speed: 1 = 0.01%
2000
(20.00 %)
Creep Speed Setting
(NCLP)
OW0B
0 to 32767
Value (%) for rated
speed: 1 = 0.01%
1000
(10.00 %)
Linear Acceleration
Time Constant
(NACC)
OW0C
0 to 32767
Linear acceleration time
constant (ms) at speed
pattern generation
1000
(1 second)
Linear Deceleration
Time Constant
(NDEC)
OW0D
0 to 32767
Linear deceleration time
constant (ms) at speed
pattern generation
1000
(1 second)
Positioning Completed
Range Setting (PEXT)
OW0E
0 to 65535
1 = 1 reference unit
With pulse: 1 = 1 pulse
10 pulses
Error Count Alarm De-
tection Setting (EOV)
OW0F
0 to 65535
1 = 1 reference unit
With pulse: 1 = 1 pulse
65535 pulses
Position Loop Gain
Setting (KP)
OW10
0 to 32767
0.1 = 0.1 /s
1 = 1 /s
300
(30.0 /s)
Filter Time Constant
(NNUM)
OW14
0 to 255
For simple S-curved
acceleration
0
IMPORTANT