2 positioning (posing), Overview – Yaskawa MP920 User's Manual Design User Manual
Page 161
4.4 Position Control Using Motion Commands
4-47
4
4.4.2
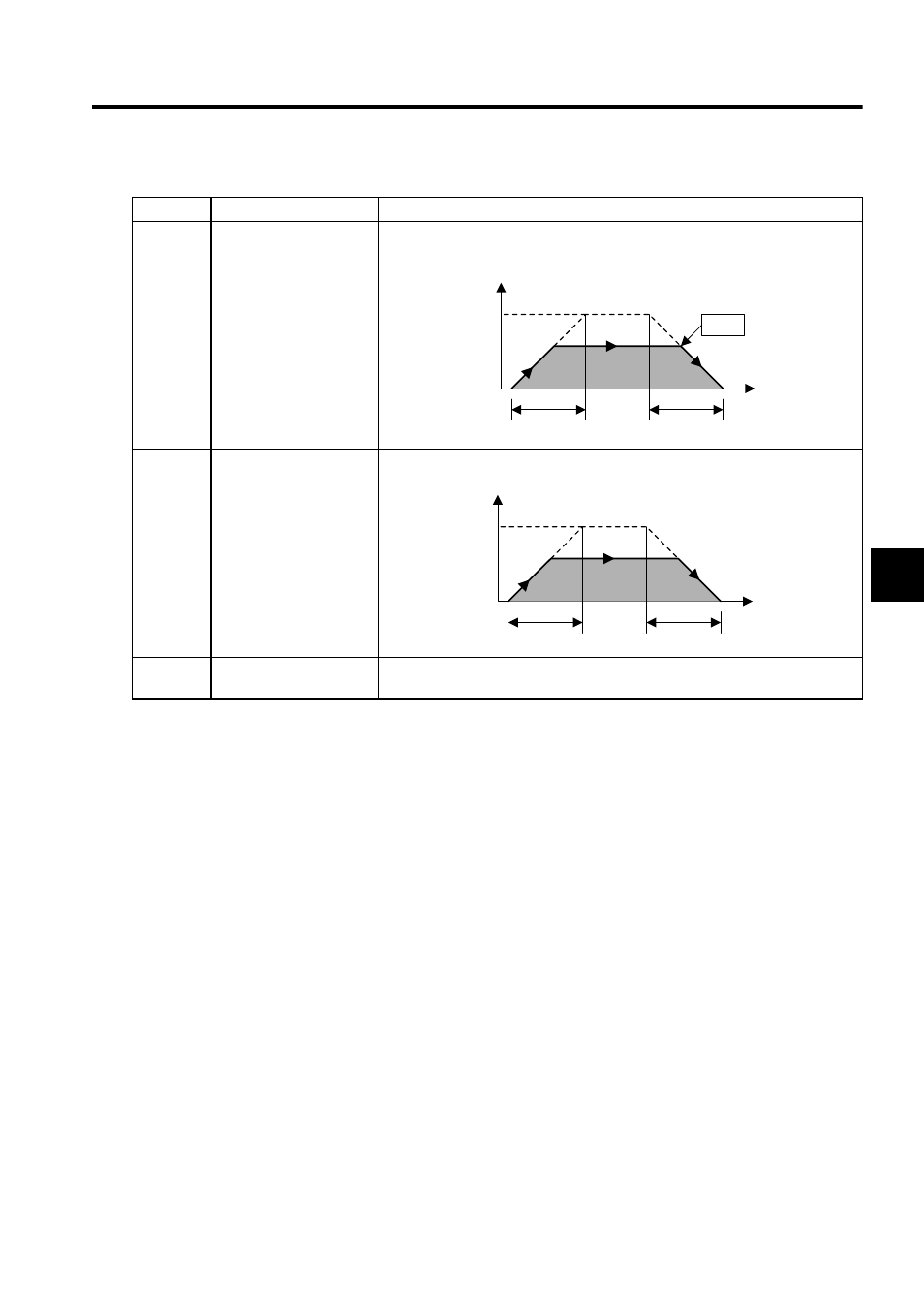
Positioning (POSING)
Overview
Positions the axis at the position reference position using the specified acceleration/decelera-
tion time constant and the specified rapid traverse speed.
The rapid traverse speed and the position reference value can be changed during operations.
When the change in the position reference value is less than the deceleration distance or the
reverse direction is used, the system first decelerates to a stop and then is repositioned
according to the position reference value.
7
Fixed Speed Feed
(FEED)
Performs rapid traverse in the infinite length direction at the specified speed and
acceleration time.
8
Fixed Length Feed
(STEP)
Performs STEP travel positioning using the specified direction, speed, and accelera-
tion time constant.
9
Zero Point Setting
(ZSET)
Determines the machine coordinate zero point, and validates the stroke limit check.
(cont’d)
Command
Name
Description
0
NOP
100%
Speed (%)
Position*
Time (t)
command
Rated speed
Rapid traverse
speed
Linear acceleration time constant
Linear deceleration time constant
* The position is the speed reference
integral value.
0
100%
Speed (%)
Rated speed
Rapid traverse
speed
STEP travel
distance
Time (t)
Linear acceleration time constant
Linear deceleration time constant