A.3.2 motion setting parameters – Yaskawa MP920 User's Manual Design User Manual
Page 542
A.3 Parameter List
A-27
A
A.3.2
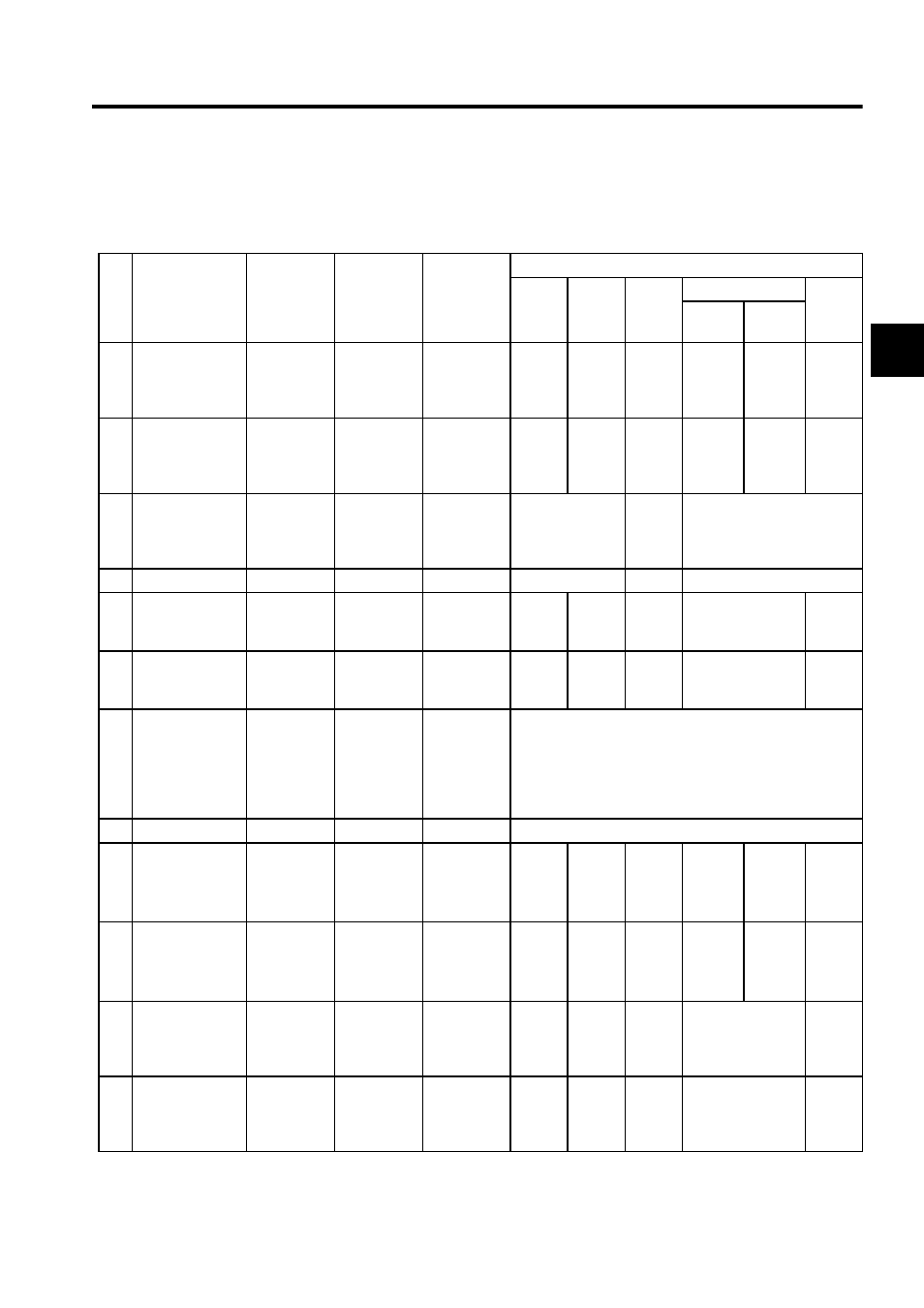
Motion Setting Parameters
The following table lists motion setting parameters.
No.
Name
Register
Number
Setting
Range
Meaning
Basic Counter
Zero
Point
Return
Speed
Torque
Position
Phase
Position
1
Position
2
1
RUN Mode
Settings
(RUNMOD)
OW00
Set by bit
(Default =
0104H)
See 7.2.2
Motion Set-
ting Parame-
ters.
0010H
0001H
0002H
0004H
0104H
0008H
2
RUN Command
Settings
(SVRUNCMD)
OW01
Set by bit
(Default =
4000H)
See 7.2.2
Motion Set-
ting Parame-
ters.
4001H
4001H
4005H
4001H
4001H
3
Positive Torque
Limit Setting
(TLIMP)
OW02
0 to
±32767
(Default =
-30000)
1 = 0.01%
VS-866: 20000
(200%)
SERVOPACK:
-20000 (-200%)
−
VS-866: 20000 (200%)
SERVOPACK: -20000
(-200%)
4
Not used
OW03
−
−
−
−
−
5
Positive Speed
Limiter Setting
(NLIMP)
OW04
0 to 32767
(Default =
15000)
1 = 0.01%
15000
(150%)
15000
(150%)
−
15000
(150%)
15000
(150%)
6
Negative Speed
Limiter Setting
(NLIMN)
OW05
0 to 32767
(Default =
15000)
1 = 0.01%
15000
(150%)
15000
(150%)
−
15000
(150%)
15000
(150%)
7
Machine
Coordinate
System Zero
Point Offset
Setting
(ABSOFF)
OL06
0 to
±2
31
-1
(Default = 0)
1 = 1 refer-
ence unit
0
(Set an appropriate value only when this function is used.)
9
Not used
OW08
−
−
−
11 Approach Speed
Setting
(Napr)
OW0A
0 to 32767
(Default = 0)
1 = 0.01% or
1 = 10
n
refer-
ence units/
min
2000
(20%)
−
−
−
2000
(2000
kpulses/
min)
−
12 Creep Speed
Setting
(Nclp)
OW0B
0 to 32767
(Default = 0)
1 = 0.01% or
1 = 10
n
refer-
ence units/
min
1000
(10%)
−
−
−
1000
(1000
kpulses/
min)
−
13 Linear
Acceleration
Time Constant
(NACC)
OW0C
0 to 32767
(Default = 0)
1 = 1 ms
300
(0.3 s)
300
(0.3 s)
−
300
(0.3 s)
−
14 Linear
Deceleration
Time Constant
(NDEC)
OW0D
0 to 32767
(Default = 0)
1 = 1 ms
300
(0.3 s)
300
(0.3 s)
−
300
(0.3 s)
−