Yaskawa MP920 User's Manual Design User Manual
Page 535
Appendix A
A.2.2 Motion Command List
A-20
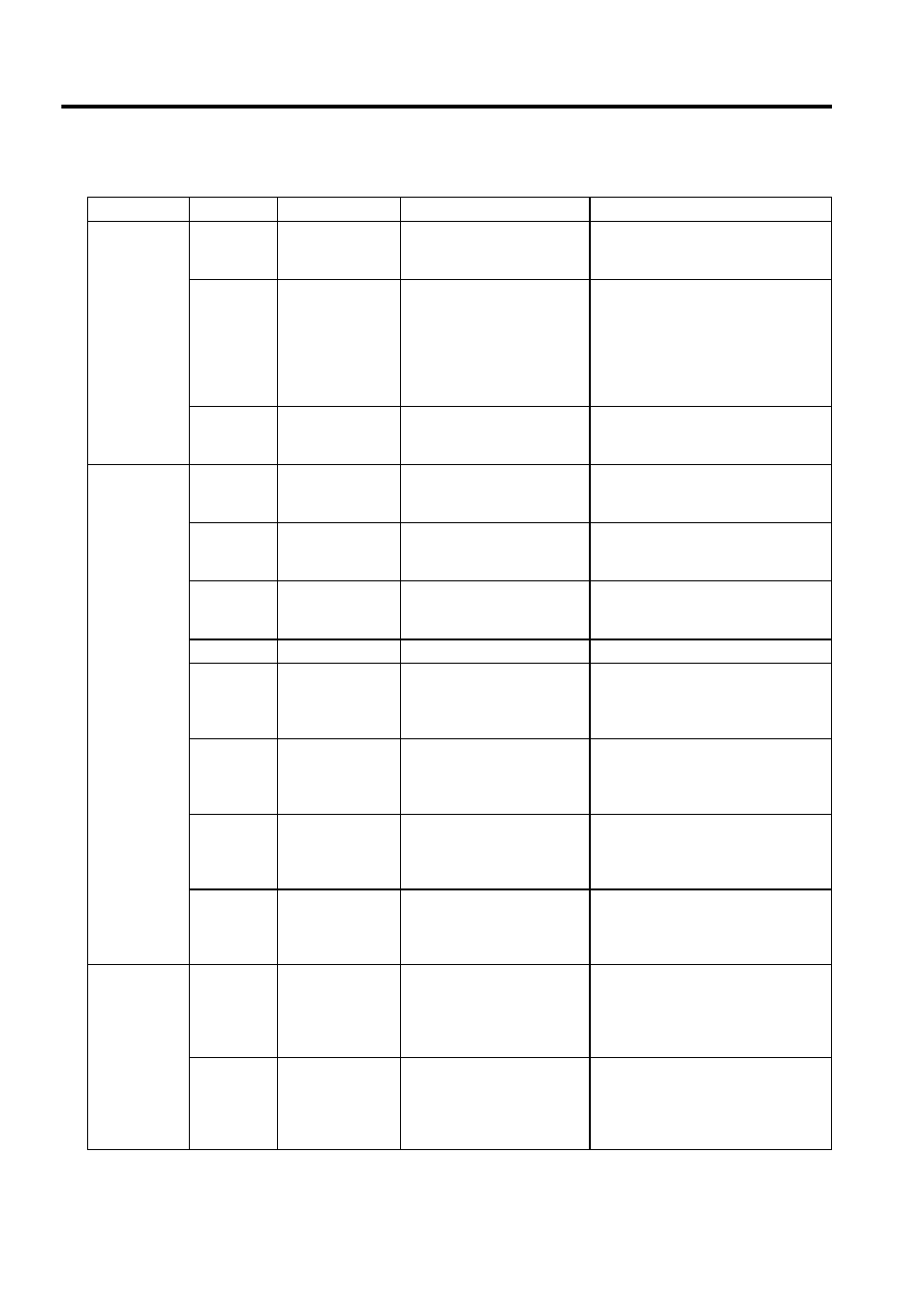
Basic Control
Commands
(cont’d)
PLN
COORDINATE
PLANE SETTING
PLN [axis1] [axis2]
Designates the coordinate plane to be
used for a command requiring a plane
designation command.
MVM
MOVE ON
MACHINE
COORDINATE
MVM MOV [axis1]
− [axis2]−;
or
MVM MVS [axis1]
− [axis2]−;
Goes to the target position on the
machine coordinate system. The coordi-
nate system set automatically on comple-
tion of the zero point return is called a
machine coordinate system. This coordi-
nate system is not affected by the POS
command.
PLD
PROGRAM CUR-
RENT POSITION
UPDATE
PLD [axis1]
− [axis2] − ⋅⋅⋅;
Updates the program current position for
axes shifted by manual intervention. Up
to 16 axes can be designated.
Speed and
Acceleration/
Deceleration
Commands
ACC
ACCELERATION
TIME CHANGE
ACC [axis1]
− [axis2] − ⋅⋅⋅;
Sets the acceleration time for linear
acceleration/deceleration for up to 16
axes simultaneously.
DCC
DECELERATION
TIME CHANGE
DCC [axis1]
− [axis2] − ⋅⋅⋅;
Sets the deceleration time for linear
acceleration/deceleration for up to 16
axes simultaneously.
SCC
S-CURVE TIME
CONSTANT
CHANGE
SCC [axis1]
− [axis2] − ⋅⋅⋅;
Sets the time constant for moving aver-
age acceleration/deceleration for up to
16 axes simultaneously.
VEL
SET VELOCITY
VEL [axis1]
− [axis2] − ⋅⋅⋅;
Sets the feed speed for up to 16 axes.
IAC
INTERPOLA-
TION ACCELER-
ATION TIME
CHANGE
IAC T
−;
Sets the acceleration time for linear
acceleration/deceleration for interpola-
tion travel.
IDC
INTERPOLA-
TION DECELER-
ATION TIME
CHANGE
IDC T
−;
Sets the deceleration time for linear
acceleration/deceleration for interpola-
tion travel.
IFP
INTERPOLA-
TION FEED
SPEED RATIO
SETTING
IFP P
−;
Designates the maximum feed % for the
speed designation during an interpola-
tion feed.
FMX
MAXIMUM
INTERPOLA-
TION FEED
SPEED SETTING
FMX T
−;
Sets the maximum speed during an inter-
polation feed.
The interpolation acceleration time is the
time from “0” until this speed is reached.
High-Level
Control
Commands
PFN
IN-POSITION
CHECK
MVS [axis1]
− [axis2] − ⋅⋅⋅
PFN;
or
PFN [axis1] [axis2] ;
Proceeds to the next block after the posi-
tioning commanded by the interpolation
travel command in the same block or a
previous block enters the positioning
completion range (parameter setting).
INP
SECOND IN-
POSITION
CHECK
INP [axis1]
− [axis2] − ⋅⋅⋅;
Proceeds to the next block after the posi-
tioning subsequently commanded by the
interpolation travel command with PFN
enters the second positioning completion
range.
(cont’d)
Classification
Command
Name
Programming Format
Function/Meaning