Details – Yaskawa MP920 User's Manual Design User Manual
Page 188
4 Motion Control
4.4.7 Fixed Speed Feed (FEED)
4-74
Details
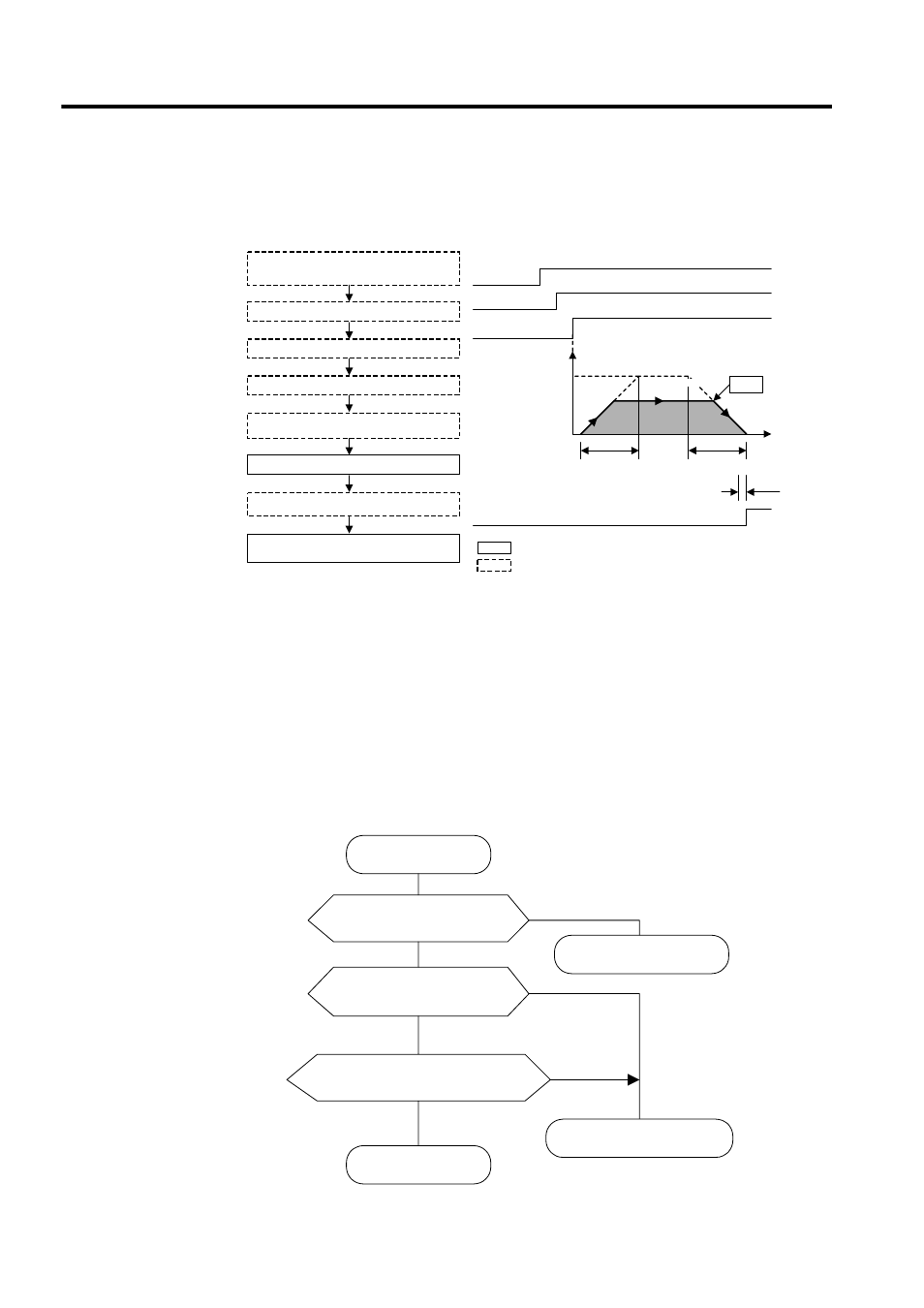
Use the following procedure to perform fixed speed feed operations.
1. Set the initial values for the motion fixed parameters and the motion setting parameters
according to the user’s machine.
2. Set the Position Control Mode (PCON) (bit 2 of OW00).
3. Set the Rapid Traverse Speed (OL22 or OW15).
Set the motion setting parameter to be used with fixed speed feed (FEED).
4. Set Servo ON (RUN) to ON (bit 0 of OW01).
For a PO-01 Module, set Excitation ON (RUN) to ON.
5. Set fixed speed feed (FEED) in the motion command code (OW20).
6. FEED operation starts.
PCON
RUN
0
POSCOMP
NOP
100%
2. Set the position control mode (PCON).
3. Set the motion setting parameters.
4. Set Servo ON (RUN) to ON.
6. Fixed-speed positioning starts.
7. Execute the motion command (NOP (= 0)).
Time (t)
Positioning completed range
Motion command
(FEED)
Position*
Speed (%)
Rated speed
* The position is the speed reference
integral value.
command
Linear acceleration time constant
Linear deceleration time constant
: System execution
: User setting
1. Set the motion fixed parameters.
Set the motion setting parameter initial values.
5. Execute the fixed speed feed (FEED) motion
command.
8. Positioning completed signal
(POSCOMP) turned ON.
Rapid traverse
speed
YES
YES
YES
NO
NO
NO
Return (OK)
FEED
Start condition check
Control mode =
position control mode?
Return (NG)
Motion command code
=NOP
||FEED?
Return (NG)
Motion command response
=NOP
||FEED?