User program example example of run operation, Ladder logic program example – Yaskawa MP920 User's Manual Design User Manual
Page 128
4 Motion Control
4.2.3 Torque Reference Output Mode
4-14
4. Set the Servo ON (RUN) to ON (bit 0 of OW01).
The torque reference and the speed limit reference will be output for the axis according
to the specified motion parameters.
Even while the torque reference output mode is being selected, the motion parameter set-
tings can be changed.
5. To stop operation, set the RUN command (RUN) and the torque reference output mode
(TCON) to OFF.
User Program Example
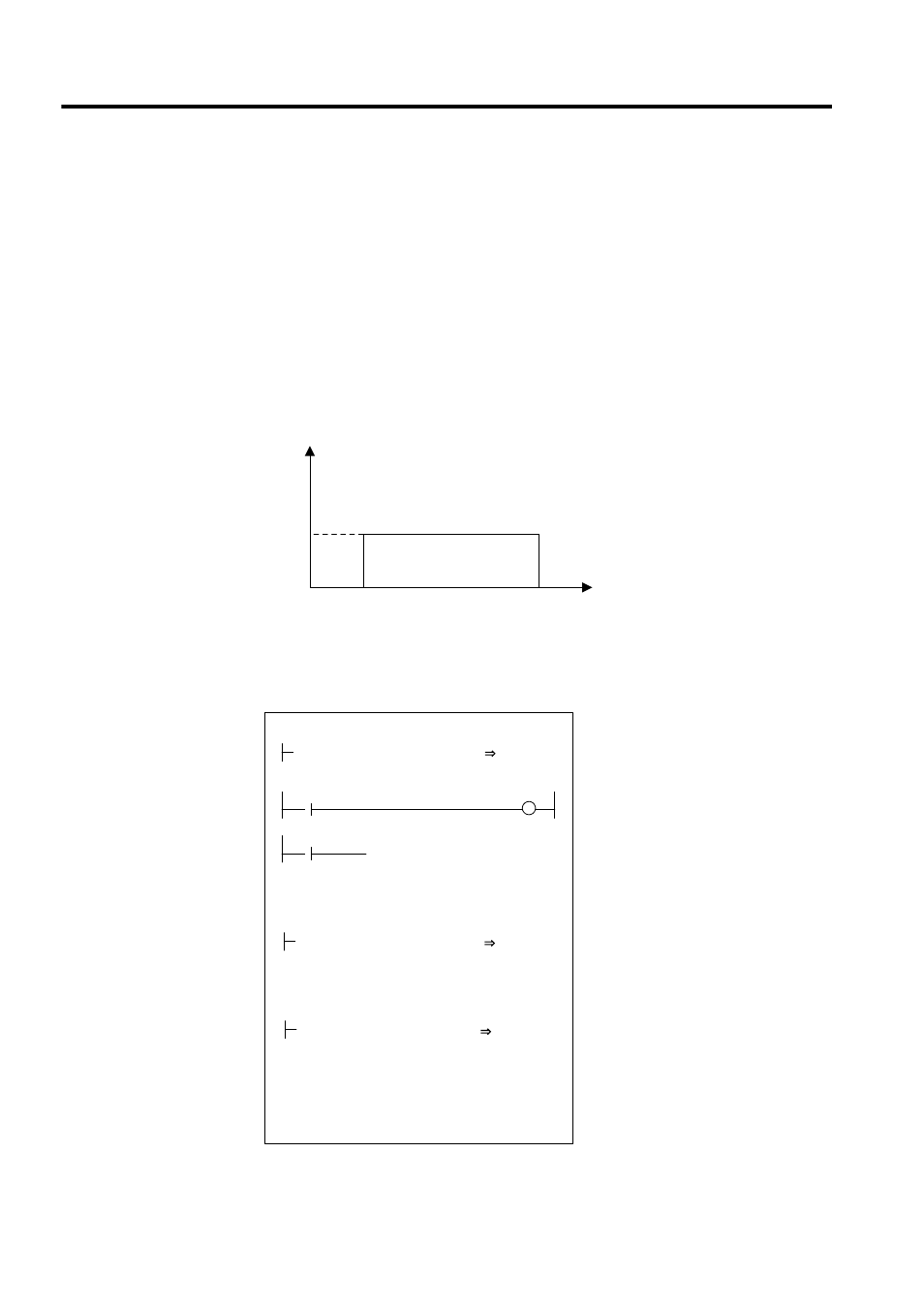
Example of RUN Operation
Fig. 4.3 Torque Pattern
Ladder Logic Program Example
Fig. 4.4 RUN Commands (DWG H02)
TREF
0
Time (t)
Torque
(%)
Torque reference
0
Set the torque reference output mode to ON.
When IB00204 turns ON, the torque
reference output mode starts.
When IB00205 turns ON, 50% is output as
the torque reference.
When IB00205 turns OFF, 0% is output as
the torque reference.
IFON
ELSE
IEND
DEND
RUN
OBC0410
RUNPB
IB00204
IB00205
5000
TREF
OWC05B
TREF
OWC05B
H0102
RUNMOD
OWC040
Driver RUN command (RUN)