Position monitoring – Yaskawa MP920 User's Manual Design User Manual
Page 151
4.3 Position Control
4-37
4
Position Monitoring
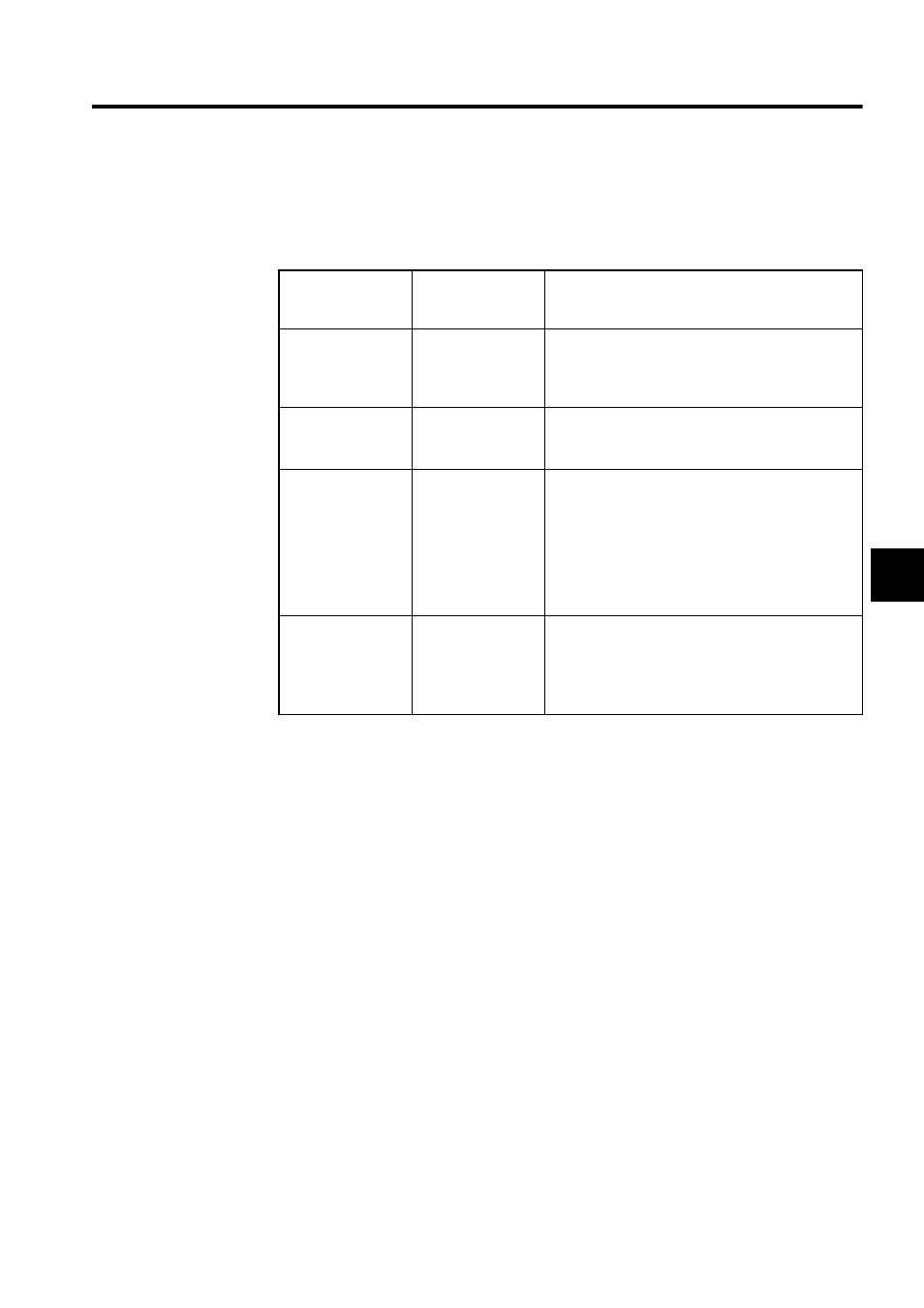
Table 4.15 shows the parameters used to monitor positioning.
* 1. Machine coordinate system
The basic coordinate system that is set according to the zero return
mode execution, the Zero Point Return (ZRET) motion command exe-
cuiton, or the Zero Point Setting (ZSET) motion command operation.
The SVA Module manages the positions using this machine coordinate
system.
* 2. When an infinite length axis is selected, a range of 0 to (infinite length
axis reset position
− 1) is reported.
With the position reference for an infinite length axis, the present
travel distance (incremental travel distance) is added to the previous
position reference (OL12), and reset as the position reference
(OL12).
The position reference (OL12) must not be set in the range of 0 to
(infinite length axis reset position
− 1).
* 3. When an infinite length axis is selected, a range of 0 to (infinite length
axis reset position
− 1) is reported.
* 4. With a finite length axis, this position is the same as that in IL02.
Table 4.15 Position Monitor Parameters
Motion Monitor
Parameter No.
(Register No.)
Name
Description
IL02
Calculated Position
in the Machine
Coordinate System
(CPOS)
The calculated position of the machine coordinate sys-
tem managed by the SVA Module is reported. Nor-
mally, the position data reported in this parameter will
be the target position for each scan.
*2
IL08
Machine Coordinate
System
*1
Feedback
Position (APOS)
The feedback position of the machine coordinate sys-
tem is reported.
*3
IL18
Machine Coordinate
System Reference
Position (MPOS)
The position output externally by the SVA Module and
the reference position of the machine coordinate sys-
tem are reported.
In machine lock status, this data is not refreshed. (With
the machine lock status, the data is not output exter-
nally.)
When the machine lock function is not used, this posi-
tion is the same as that in IL02.
IL2E
Calculated Reference
Coordinate System
Position (POS)
This position is significant when the axis selected is an
infinite length axis.
With an infinite length axis, the target position for
each scan corresponding to the position reference in
this parameter is reported.
*4