Yaskawa MP920 User's Manual Design User Manual
Page 186
4 Motion Control
4.4.5 Interpolation (INTERPOLATE, END_OF_INTERPOLATE)
4-72
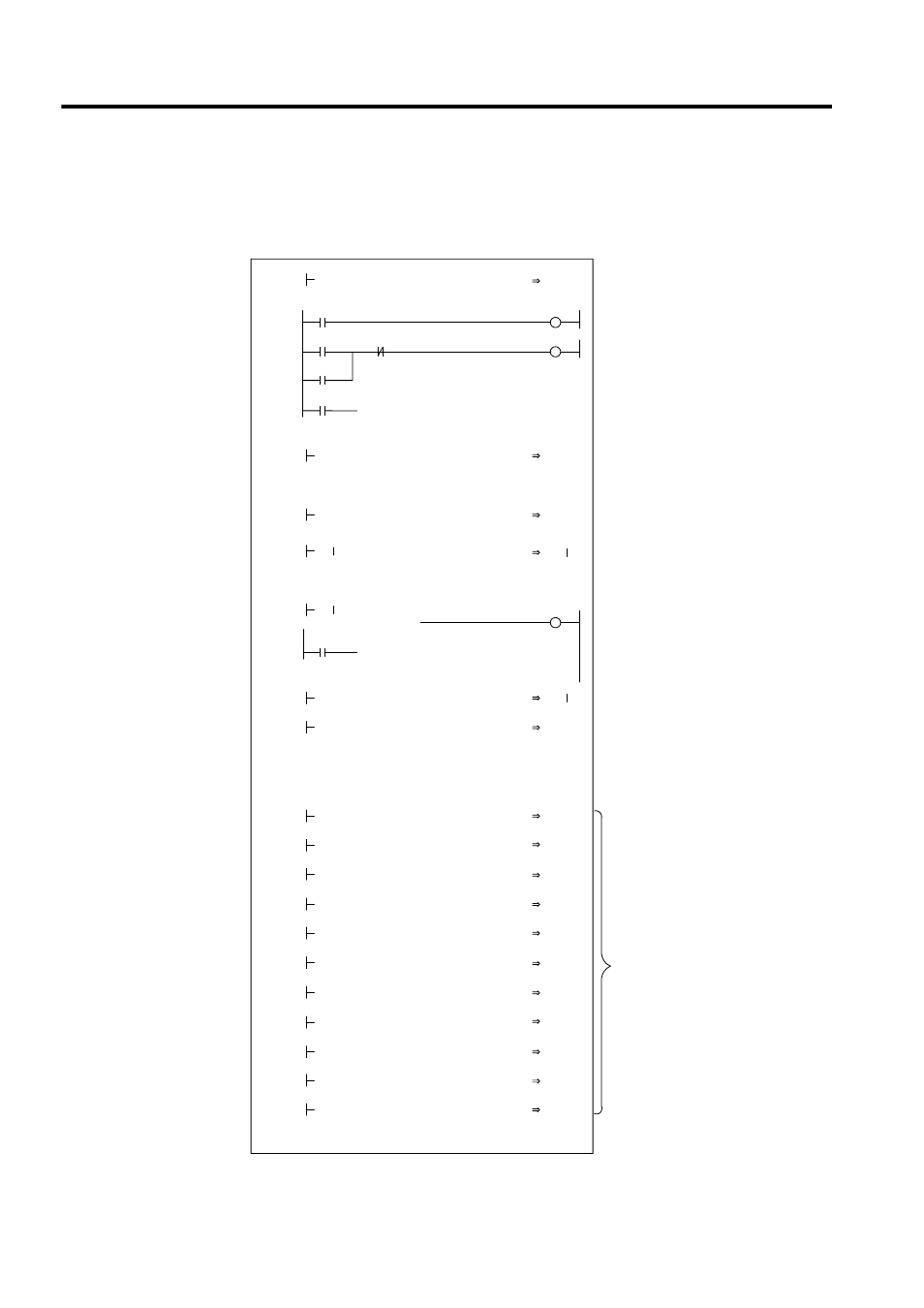
User Program Example: Interpolation
Ladder Logic Program Example
Fig. 4.21 Interpolation Programming Example (INTERPOLATE,
END_OF_INTERPOLATE)
H0104
RUNMOD
OWC000
1 0000
IB00100
RUNPB
IB00304
OBC0010
1 0002
1 0004
DB000000
DB000001
DB000001
1 0005
1 0008
IFON
1 0009
00004
OWC020
2 0010
OLC012
OLC012
2 0012
DL00010i
2 0015
00002
IEND
1 0018
2 0019
00022
DB000001
DB000000
DB000000
1 0022
IFON
1 0023
00000
2 0024
00005
OWC020
2 0026
IEND
1 0028
00100
DL00010
1 0029
00200
DL00012
1 0031
00300
DL00014
1 0033
00200
DL00016
1 0035
00100
DL00018
1 0037
00000
DL00020
1 0039
-00100
DL00022
1 0041
-00200
DL00024
1 0043
-00300
DL00026
1 0045
-00200
DL00028
1 0047
-00100
DL00030
1 0049
DEND
0 0051
Set the position control mode to ON.
RUN command to the driver
Execute INTERPOLATE command.
Set the position reference.
Confirm the completion of the specified
distribution.
Execute END_OF_INTERPOLATE
command.
Incremented daa of position reference
evey scan