Yaskawa MP920 User's Manual Design User Manual
Page 417
7 Parameters
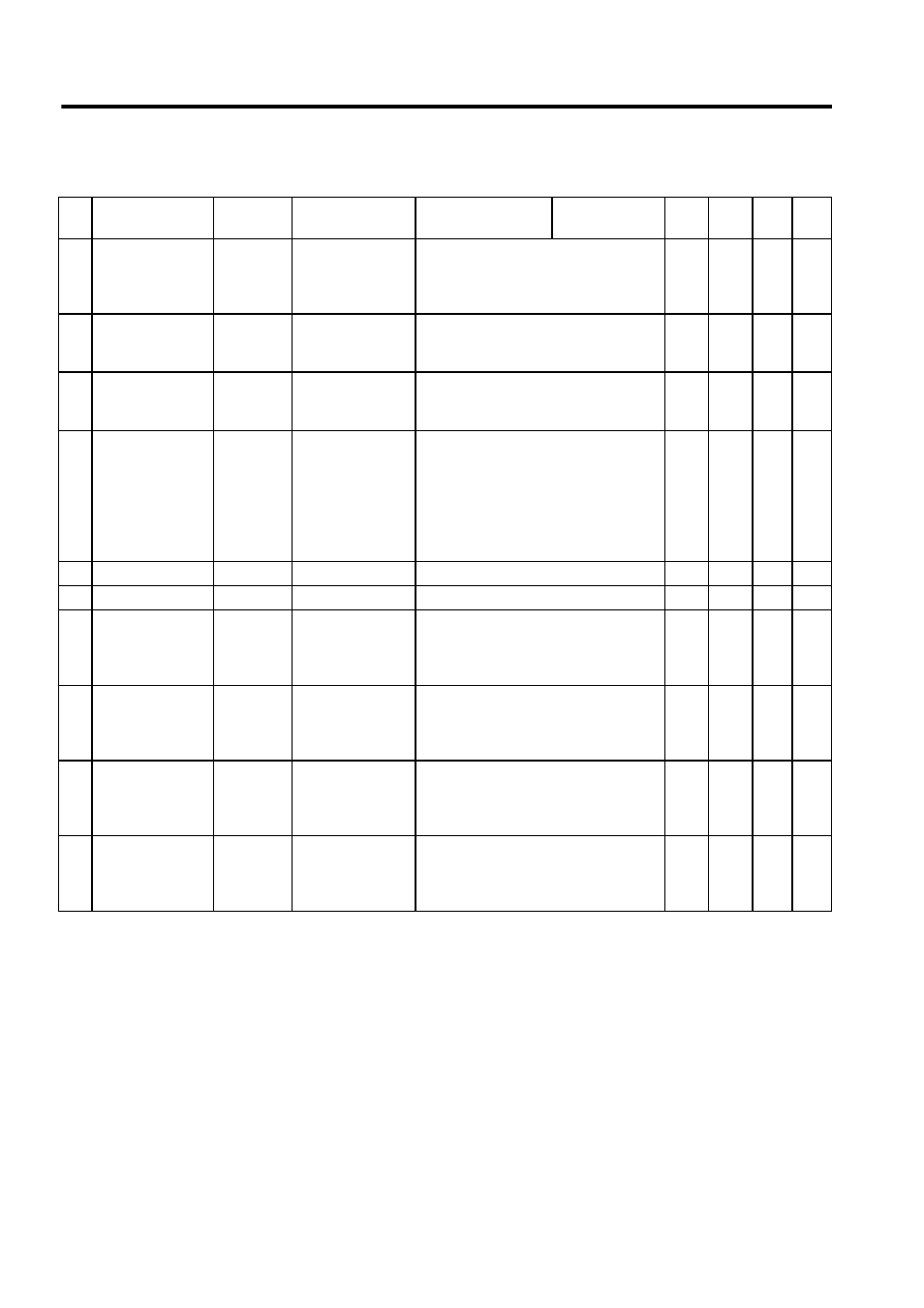
7.2.3 Motion Monitoring Parameter
7-22
47 Calculated Refer-
ence Coordinate
System Position
(POS)
IL 2E
−2
31
to 2
31
−1
1 = 1 reference unit
9
9
9
9
49 Primary Lag Mon-
itor
(LAGMON)
IL 30
−2
31
to 2
31
−1
(PI output value
− Primary lag output
value)
9
9
51 Position Loop
Output Monitor
(PIMON)
IL 32
−2
31
to 2
31
−1
Position loop output value
(Value before adding the calculated feed
forward value)
9
9
53 Position Monitor 2
(APOS2)
IL 34
−2
31
to 2
31
−1
Depends on the Position Monitor 2 Unit
Selection (OB
2D3):
When OB
2D3 = 0 (reference unit
selected),
1 = 1 reference unit
When OB
2D3 = 1 (pulse selected),
1 = 1 pulse
9
9
55 Not used
IW 36
−
−
56 Not used
IW 37
−
−
57 Encoder Position
at Shutdown
(Lower-place two
words)
IL 38
−2
31
to 2
31
−1
1 = 1 pulse
(For ABS system infinite length position
control)
9
9
9
59 Encoder Position
at Shutdown
(Upper-place two
words)
IL 3A
1 = 1 pulse
(For ABS system infinite length position
control)
9
9
9
61 Pulse Position at
Shutdown
(Lower-place two
words)
IL 3C
−2
31
to 2
31
−1
1 = 1 pulse
(For ABS system infinite length position
control)
9
9
9
63 Pulse Position at
Shutdown
(Upper-place two
words)
IL 3E
−2
31
to 2
31
−1
1 = 1 pulse
(For ABS system infinite length position
control)
9
9
9
Table 7.4 Motion Monitoring Parameters (cont’d)
No
Name
Register
No.
Bit
(Setting Range)
Meaning
Remarks
SVA-
01A
SVA
-02A
SVB
-01
PO-
01