Yaskawa MP920 User's Manual Design User Manual
Page 402
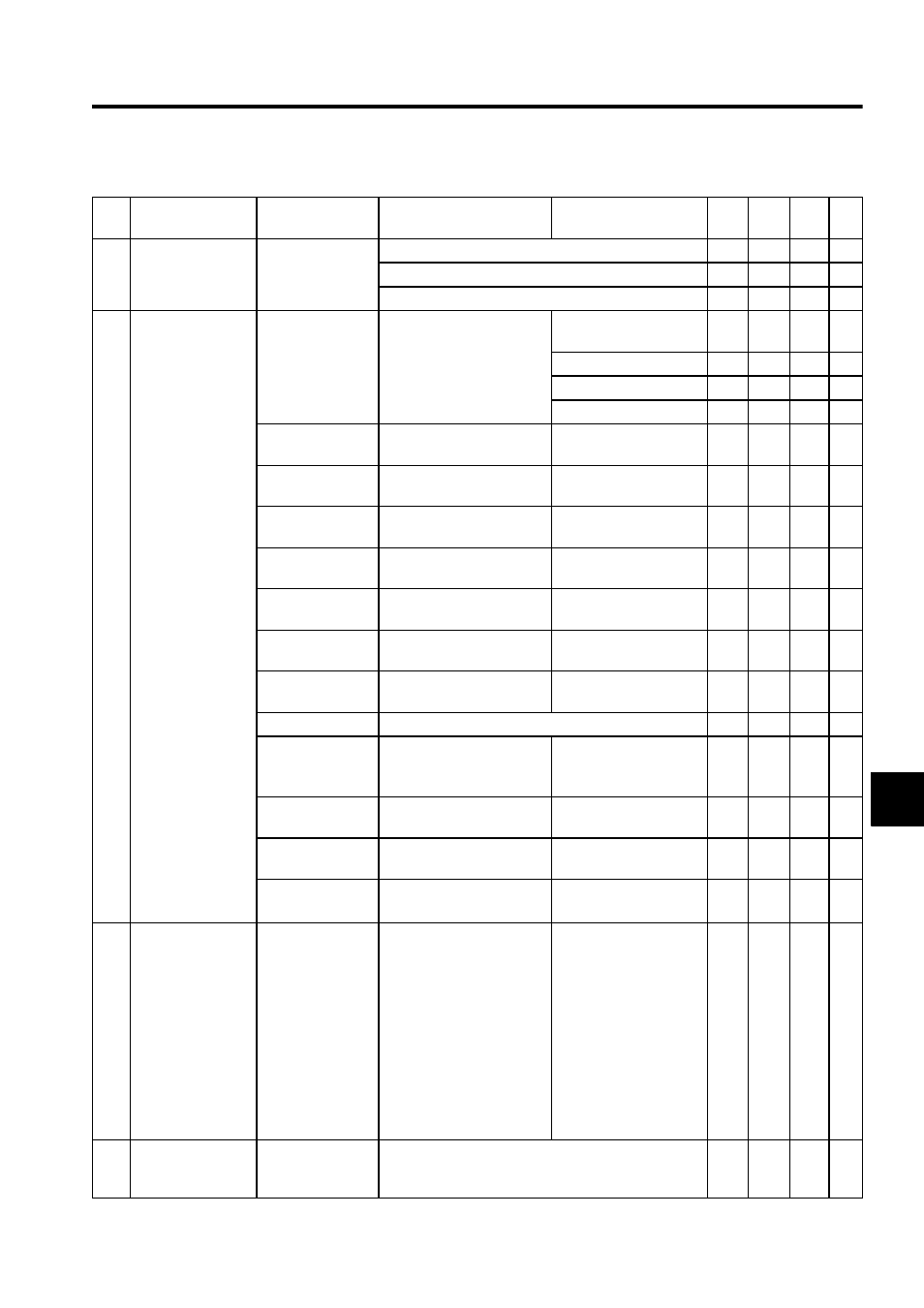
7.2 Parameters for Each Motion Module
7-7
7
16
Simulation Mode
Selection
(SIMULATE)
0 to 2
(Default = 0)
0: Normal operation mode
√
√
√
1: Simulation mode
√
√
√
2: Factory adjustment mode
√
√
17
Motion Controller
Function Selec-
tion Flags
(SVFUNCSEL)
Bit 0 to 3: 0 to 7
CMD_UNIT
Reference Unit Selection
0: pulse (Electronic
gear disabled)
√
√
√
√
1: mm
√
√
√
√
2: deg
√
√
√
√
3: inch
√
√
√
√
Bit 4: USE_GEAR
Electronic Gear Selection
0: Disabled
1: Enabled
√
√
√
√
Bit 5: PMOD_SEL Axis Selection
0: Finite length axis
1: Infinite length axis
√
√
√
√
Bit 6:
USE_BKRSH
Backlash Compensation
Enabled Selection
0: Disabled
1: Enabled
√
√
Bit 7: USE_SLIMP Positive Software Limit
Selection
0: Disabled
1: Enabled
√
√
√
√
Bit 8:
USE_SLIMN
Negative Software Limit
Selection
0: Disabled
1: Enabled
√
√
√
√
Bit 9: USE_OV
Override Selection
0: Disabled
1: Enabled
√
√
√
√
Bit 10: INV_DEC
Deceleration Limit Switch
Inversion Selection
0: Do not reverse.
1: Reverse.
√
√
√
Bit 11: Not used.
−
Bit 12:
Servo Drive Transparent
Reference Mode
0: Normal
1:Transparent reference
mode
√
Bit 13: OVT1_SEL Positive Overtravel Selec-
tion
0: Disabled
1: Enabled
√
√
Bit 14: OVT2_SEL Negative Overtravel Selec-
tion
0: Disabled
1: Enabled
√
√
Bit 15: SEGBUF
Interpolation Segment Dis-
tribution Selection
0: Enabled
1: Disabled
√
18
Number of Digits
Below Decimal
Point (DECNUM)
0 to 5
(Default = 3)
Sets the number of digits
below decimal point in com-
mands.
(Example)
With 3 digits below decimal
point
mm: 1 reference unit =
0.001 mm
deg: 1 reference unit =
0.001 deg
inch:1 reference unit =
0.001 inch
Minimum reference unit
is determined by this
parameter as well as by
the Reference Unit Selec-
tion (see fixed servo
parameter no. 17.). They
do not affect the pulse
minimum unit.
√
√
√
√
19
Distance Traveled
Per Machine Rota-
tion (PITCH)
1 to 2
31
-1
(Default = 10000)
1 = 1 reference unit
√
√
√
√
Table 7.2 Motion Fixed Parameters (cont’d)
No.
Name
Setting Range
Meaning
Remarks
SVA
-01A
SVA
-02A
SVB
-01
PO
-01