Yaskawa MP920 User's Manual Design User Manual
Page 168
4 Motion Control
4.4.3 External Positioning (EX_POSING)
4-54
8. When the axis enters the Positioning Completed Range (OW0E) after Distribution
Completed (bit 2 of IW15 is ON), the POSCOMP Positioning Completed Signal (bit
D of IW00) turns ON.
9. Once external positioning has been completed, set the NOP command to 0 to release the
external positioning motion command.
External positioning is detected at startup. Therefore, when external positioning has been executed, the
motion command must immediately be set to NOP, and external positioning must be reset in a motion
command.
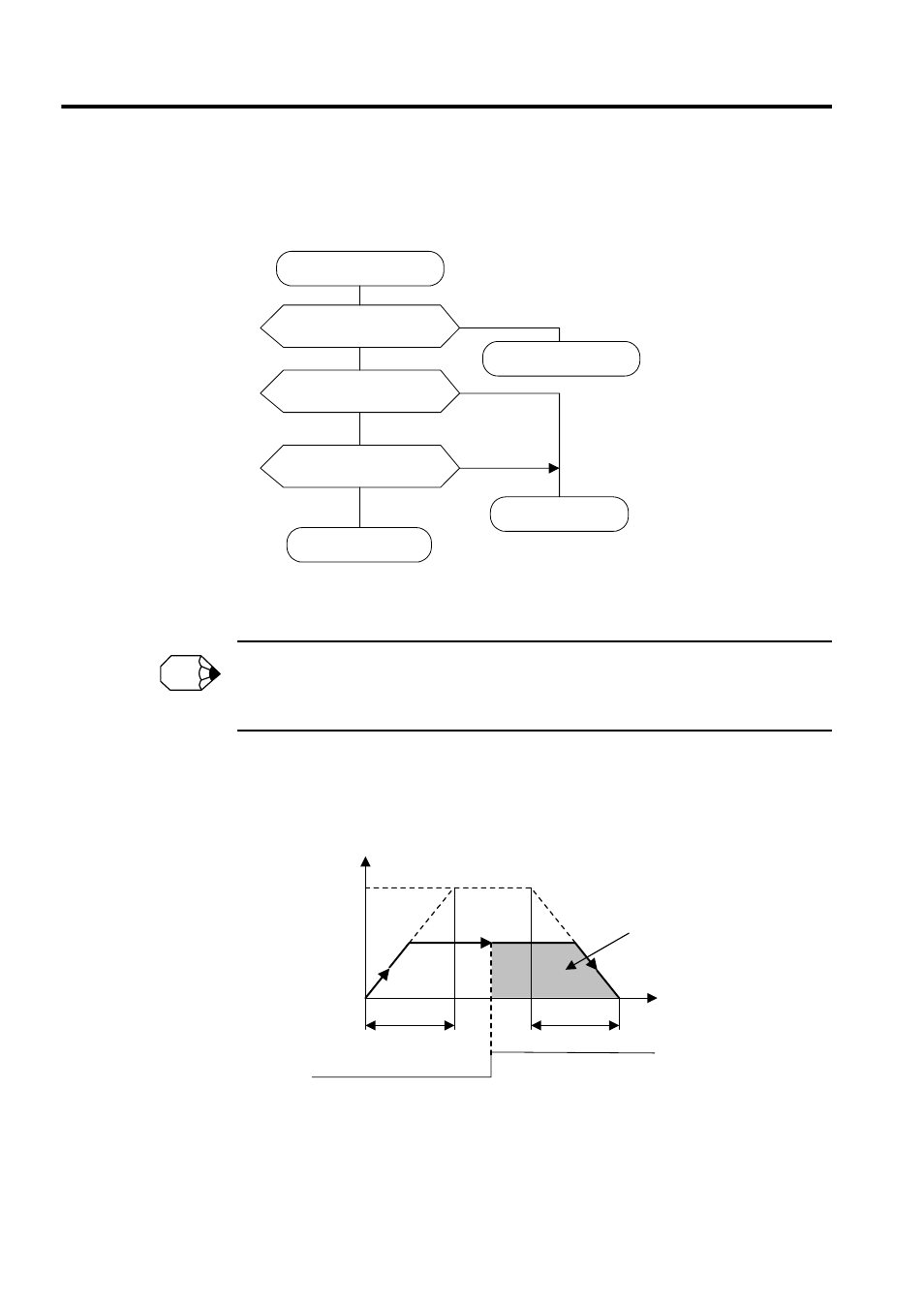
User Program Example: External Positioning
Example of RUN Operation
Fig. 4.17 Example of an External Positioning Pattern
Return (EX_POSING
completed)
YES
YES
YES
NO
NO
NO
Return (EX_POSING
executing)
Return (Other motion
command executing)
Motion command response
=EX_POSING?
Motion command status
BUSY=OFF?
POSCOMP operation status
= ON?
EX_POSING
Completion condition check
INFO
(100%)
0
Speed
(%)
Time (t)
Linear acceleration time constant
Linear deceleration time constant
Rated speed
Rapid traverse
speed
External positioning
travel distance
Latch signal (external positioning signal)