Dec1 + c-phase pulse – Yaskawa MP920 User's Manual Design User Manual
Page 171
4.4 Position Control Using Motion Commands
4-57
4
Details on each method are given next.
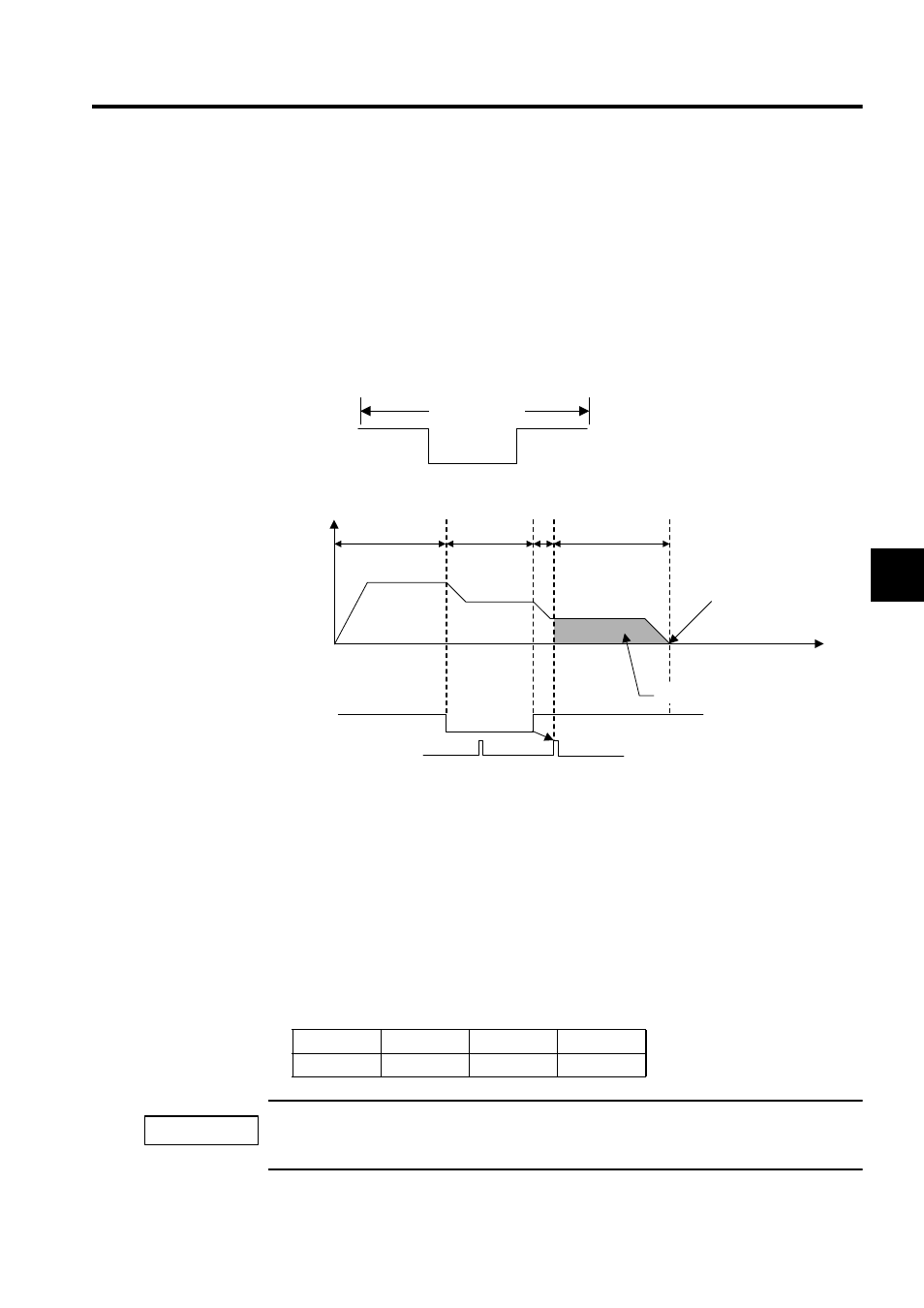
DEC1 + C-phase Pulse
This method is used to perform zero point return using a limit switch (deceleration limit
switch) and a zero point signal (C-phase pulse) by rapid traverse using linear acceleration/
deceleration (with a dog width).
This method can be used in the mechanical configuration with the limit switch as shown in
the illustration below.
1. The axis travels at rapid traverse speed in the direction specified in the motion setting
parameter (OB009).
2. The axis decelerates to approach speed at the falling edge of the dog (deceleration limit
switch) signal.
3. The axis decelerates to creep speed at the rising edge of the dog (deceleration limit
switch) signal.
4. When the dog high, the axis stops after traveling only the zero point return final travel
distance (OL2A) from the initial zero point signal (C-phase pulse), and that position
will be the machine coordinate system zero point.
Automatic return is not performed with this zero point return method. Where zero point return to a posi-
tion is not possible, use a manual operation to return to the zero point.
High
Deceleration
limit switch
Low
Machine total
operating area
0
1.
2.
3.
4.
Reverse direction
← →Forward direction
Zero point
Speed
reference
Rapid traverse
speed
Approach
speed
Creep speed
Zero point
return position
Dog
(Deceleration limit switch)
Zero point signal
(C-phase pulse)
Zero point return final travel distance
Time
SVA-01A
SVA-02A
SVB-01
PO-01
Applicable
Applicable
Applicable
N/A
IMPORTANT