Overview, Details – Yaskawa MP920 User's Manual Design User Manual
Page 195
4.4 Position Control Using Motion Commands
4-81
4
Overview
When the zero point setting is executed, the current position will be the machine coordinate
system zero point. Therefore, the zero point can be set without performing a zero point return
operation.
When a stored stroke limit is used, be sure to execute a zero point return operation or a zero
point setting.
Details
Use the following procedure to set the zero point.
1. Move the machine to the zero point using fixed speed feed, fixed length feed, or manual
operation.
2. Set the Position Control Mode (PCON) (bit 2 of OW00).
Note: Set
“
Use (= 1)
”
in bit 7 (motion command use selection) of motion
fixed parameter No. 14 (Additional Function Selections). Set
“
1 (=
Enabled)
”
in bit 8 (motion command code enabled selection) of the
RUN Mode Selection (OW00) motion setting parameter.
3. Set the zero point setting (ZSET = 9) in the motion command code (OW20).
Note: Servo ON (bit 0 of OW01) may be either ON or OFF. The zero
point setting (ZRET) command cannot be executed when the axis is
traveling if motion fixed parameter No. 3 (Encoder Selection) is set in
the absolute encoder (= 1) and bit 5 (axis selection) of motion fixed
parameter No. 17 (Motion Controller Function Selection Flags) is set
to
“
infinite length axis
”
(= 1),
4. When the zero point setting has been completed, Zero Point Setting Completed (bit 3 of
IW15) and the Zero Point Return Completed (bit 6 of IW15) turn ON.
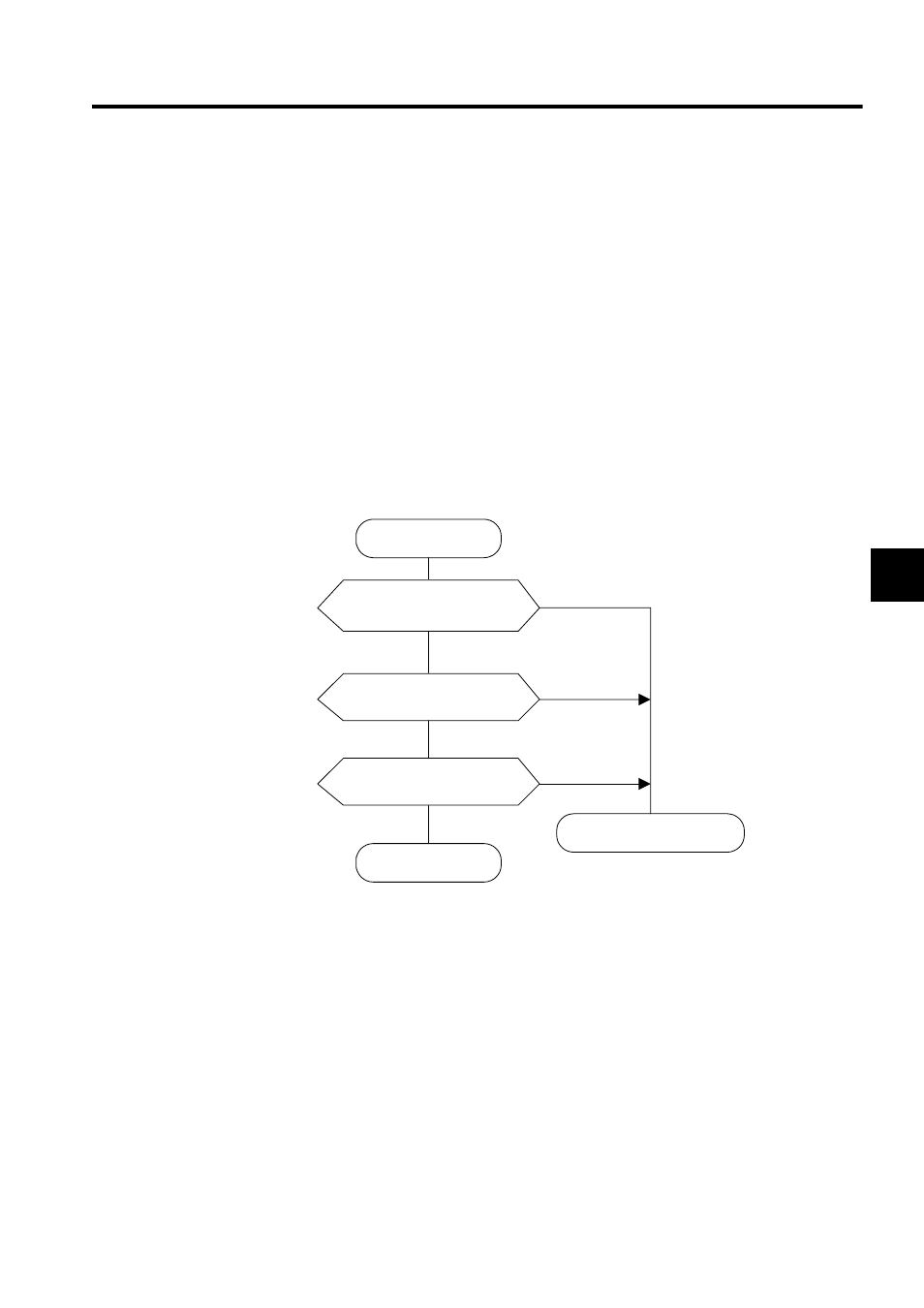
YES
YES
NO
NO
YES
NO
Return (OK)
ZSET
Start condition check
Motion command code
=NOP?
Motion command response
=NOP?
Motion command status
BUSY=OFF?
Return (NG)