Yaskawa MP2200 Machine Controller User Manual
Page 157
4.3 SVB-01 Module Parameter Details
4-37
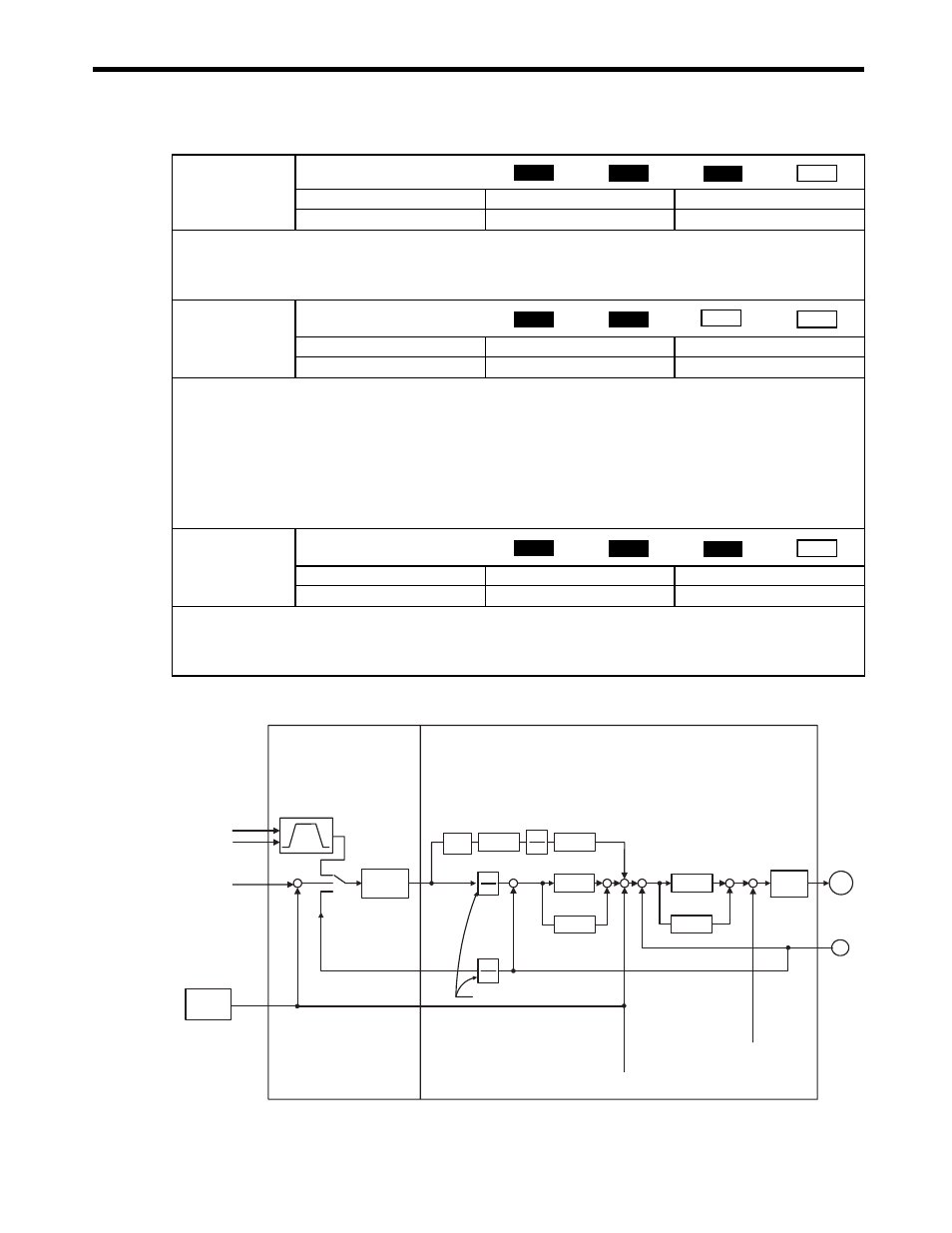
The following figure shows the relationship between the above related parameters.
OW31
Speed Amends
Setting Range
Setting Unit
Default Value
−32768 to 32767
0.01%
0
Set the speed feed forward gain as a percentage of the rated speed for the phase reference command (PHASE).
The setting unit for this parameter is 0.01% (fixed). The unit for Secondary Speed Compensation (OL16), however, can be
selected by the user.
When used at the same time as OL16, speed compensation can be applied twice.
OW32
Position Integration Time
Constant
Setting Range
Setting Unit
Default Value
0 to 32767
ms
0
Set the position loop integration time constant. Use this parameter to improve the following precision in applications such as
electronic cams or shafts.
The actual machine operation depends on the settings in the SERVOPACK parameters. Refer to 9.4 Parameters That Are Auto-
matically Updated for details on making parameters automatically effective.
If this parameter changes, the corresponding SERVOPACK parameter will change automatically.
This function is achieved using the Servo command expansion area and can be executed when using the MECHATROLINK-II
(32-byte Mode) communication method. The motion command KIS must be used to make changes to this parameter.
There is no parameter to set the integration time constant in the SGD-N or SGDB-N SERVOPACK, so the Position Integration
Time Constant cannot be used.
OW34
Speed Integration Time
Constant
Setting Range
Setting Unit
Default Value
15 to 65535
0.01 ms
2000
The speed loop has an integral element to enable responding to minute inputs.
This element, however, causes a delay in the Servo system, adversely affecting the response if the time constant is set too large.
The actual machine operation depends on the settings in the SERVOPACK parameters. Refer to 9.4 Parameters That Are Auto-
matically Updated for details on making parameters automatically effective.
(cont’d)
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Pn109
Pn10A
Pn102
Pn101
A
B
Pn100
A
B
M
PG
Pn11F
A
B
NS100/NS115
OW
3A
(OW
32)
(OW
30)
(OW
31)
(OW
2F)
S
Kp
Ti
(OW
2E)
(OW
34)
Kv
NTi
FB
Vref
Filter
Differ-
ential
Speed
compen-
sation
Acceleration/
deceleration
processing
Acceleration: OL
36
Deceleration: OL
38
Followup
(Not supported.)
SERVOPACK
Set in a 1:1 ratio.
Current
loop