21 reset absolute encoder (abs_rst), 21 reset absolute, 21 reset absolute encoder (abs_rst) -98 – Yaskawa MP2200 Machine Controller User Manual
Page 328: 1 ) operating procedure, 2 ) holding and aborting, Important
5 Motion Commands
5.2.21 Reset Absolute Encoder (ABS_RST)
5-98
5.2.21 Reset Absolute Encoder (ABS_RST)
The ABS_RST command resets the multiturn data in the absolute encoder to 0. If an Encoder Backup
Alarm (A.810) or Encoder Checksum Alarm (A.820) occurs when the ABS_RST command is
executed, the encoder will be reset. The ABS_RST command can be executed to reset the encoder’s
multiturn data to 0 when these alarms occur or when the machine is being used for the first time.
( 1 ) Operating Procedure
When the absolute encoder has been reset, communication will be disconnected between the Machine
Controller and the SERVOPACK. The zero point setting completed and zero point return completed
status will thus be cleared. Clear the alarm and re-establish communication, and then execute the ZRET
or ZSET command.
( 2 ) Holding and Aborting
The Command Pause bit (OB090) and the Command Abort bit (OB091) cannot be used.
Processing will be canceled if a communication error occurs while the command is being executed
and a command error end will occur.
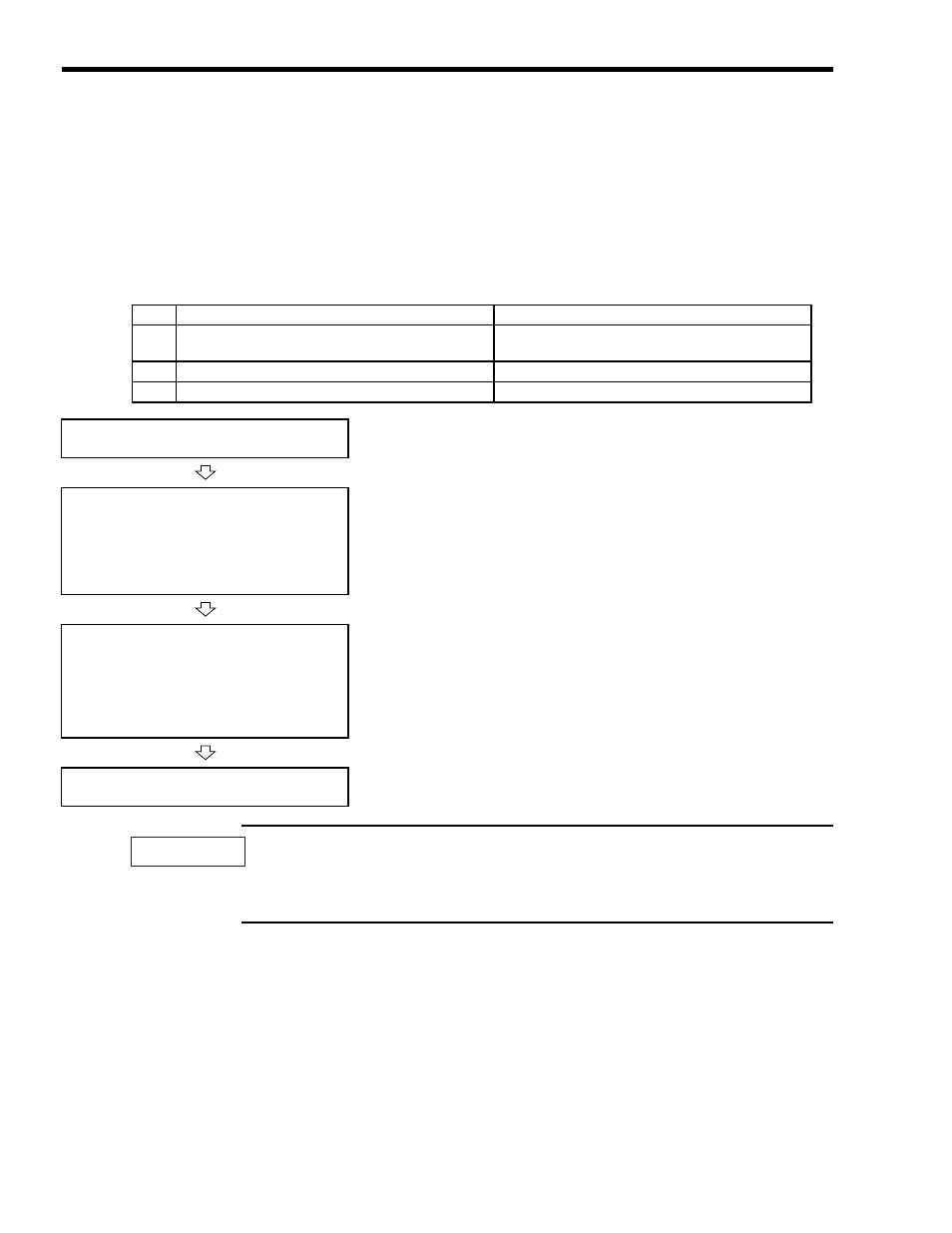
No.
Execution Conditions
Confirmation Method
1
Communication with the SERVOPACK must be
synchronized.
IB000 is ON.
2
The Servo OFF condition.
IB001 is OFF.
3
Motion command execution has been completed.
OW08 is 0, IW08 is 0, and IB090 is OFF.
Execute the ABS_RST motion command.
• Set OW08 to 22.
• If the ABS_RST command is executed while an A.81 alarm exists,
the alarm clear operation will have to be performed twice before
communication can be synchronized again.
• The ABS_RST command is valid for
Σ-II and Σ-III Series
SERVOPACKs. A command error will occur if the ABS_RST
command is executed for a
Σ Series SERVOPACK. A command
error will also occur if the ABS_RST command is executed when
an incremental encoder is being used (even if it is being used as an
absolute encoder).
• The Command Pause (OB090) cannot be used.
• The Command Abort (OB091) cannot be used.
Any alarms that have occurred will be cleared and
the multiturn data in the absolute encoder will be
set to 0.
• IW08 will be 22 during execution.
• IB090 will be ON during command
processing.
Initializing the absolute encoder completed.
• IW08 will be 22 and IB090 will turn
OFF.
• IB093 will turn OFF.
• IB097 will turn ON.
• IB000 will turn OFF.
Execute NOP motion command.
• Set OW08 to 0.
IMPORTANT