6 jog operation (feed), 6 jog, 6 jog operation (feed) -64 – Yaskawa MP2200 Machine Controller User Manual
Page 294: 1 ) operating procedure ( 2 ) holding, 3 ) aborting
5 Motion Commands
5.2.6 JOG Operation (FEED)
5-64
5.2.6 JOG Operation (FEED)
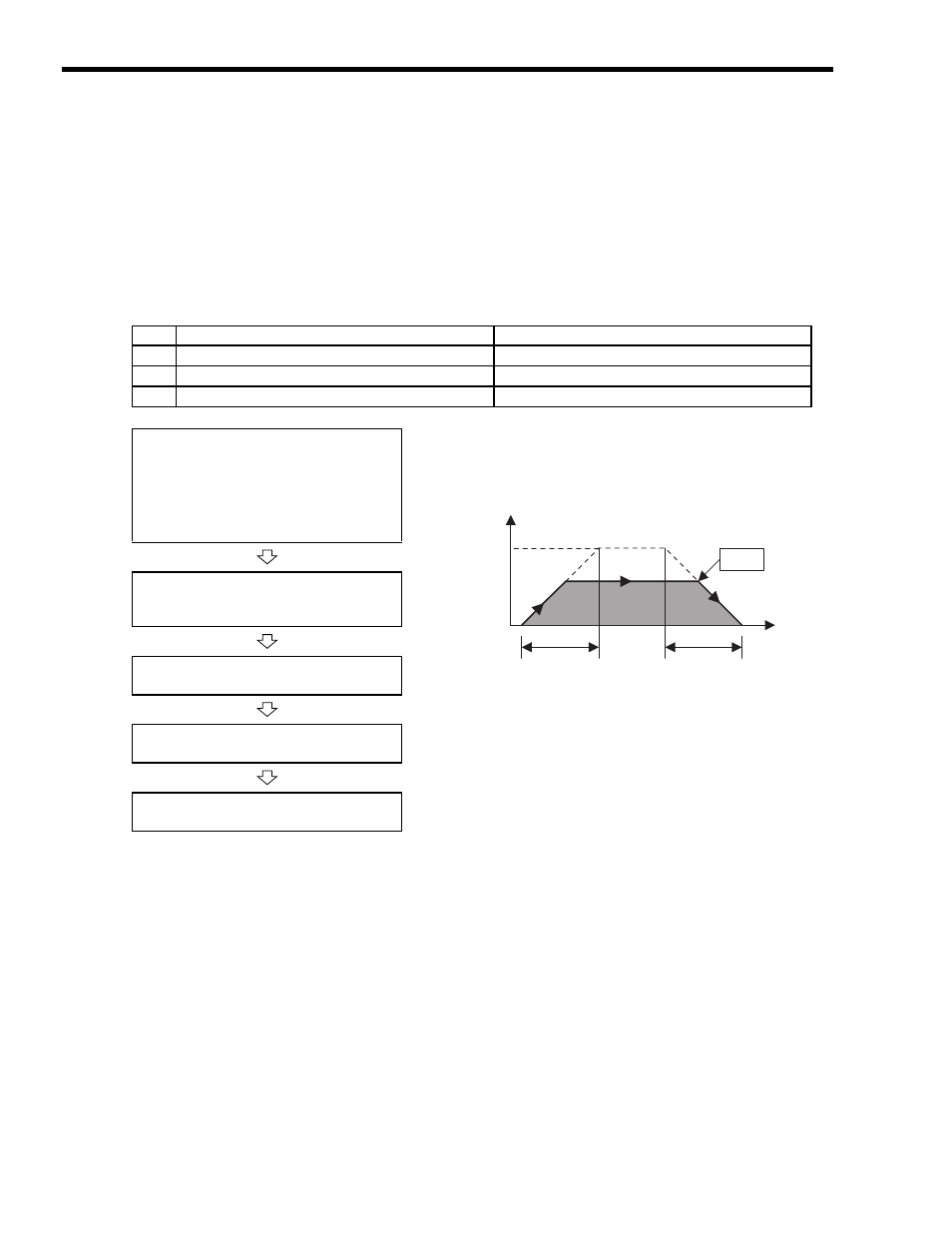
The FEED command starts movement in the specified travel direction at the specified travel speed.
To stop the operation, execute the NOP motion command. The axis will decelerate to a stop when the
NOP motion command is executed.
Parameters related to acceleration and deceleration are set in advance. The speed can be changed
during axis movement.
( 1 ) Operating Procedure
( 2 ) Holding
Holding execution is not possible during FEED command execution. The Command Pause bit
(OB090) is ignored.
( 3 ) Aborting
Axis travel can be stopped during FEED command execution by aborting execution of a command.
A command is aborted by setting the Command Abort bit (OB091) to 1.
1.
Set the Command Abort bit (OB091) to 1. The axis will decelerate to a stop. When
the axis has stopped, the Positioning Completed bit (IB01C) will turn ON.
2.
The JOG operation will restart if the Command Abort bit (OB091) is reset to 0
during abort processing.
This type of operation will also be performed if the motion command is changed during axis
movement.
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
Both IL02 and IL04 are 0.
2
The Servo ON condition.
IB001 is ON.
3
Motion command execution has been completed.
IW08 is 0 and IB090 is OFF.
Set the motion setting parameters.
• Direction of Movement: OB092
• Speed Reference: OL10
• Acceleration/Deceleration Filter Type:
OW03
• Speed Loop P/PI Switch: OW01
• The travel speed can be changed during movement.
• The Command Pause (OB090) cannot be used.
• The axis will decelerate to a stop if the Command Abort bit
(OB091) is set to 1 during execution.
Execute the JOG operation (FEED) motion
command.
• Set OW08 to 7.
JOG operation starts.
• IW08 will be 7 during execution.
Execute NOP motion command.
• Set OW08 to 0.
Positioning completed.
• IB0C1 will turn ON.
Position*
Speed (%)
Time (t)
0
Rated speed
Linear
Acceleration Time
Linear
Deceleration Time
Command
NOP
100%
∗ The position will be the
integral of the travel speed.
Travel
speed