11 ) speed information – Yaskawa MP2200 Machine Controller User Manual
Page 216
4 Motion Parameters
4.4.3 Motion Monitoring Parameter Details
4-96
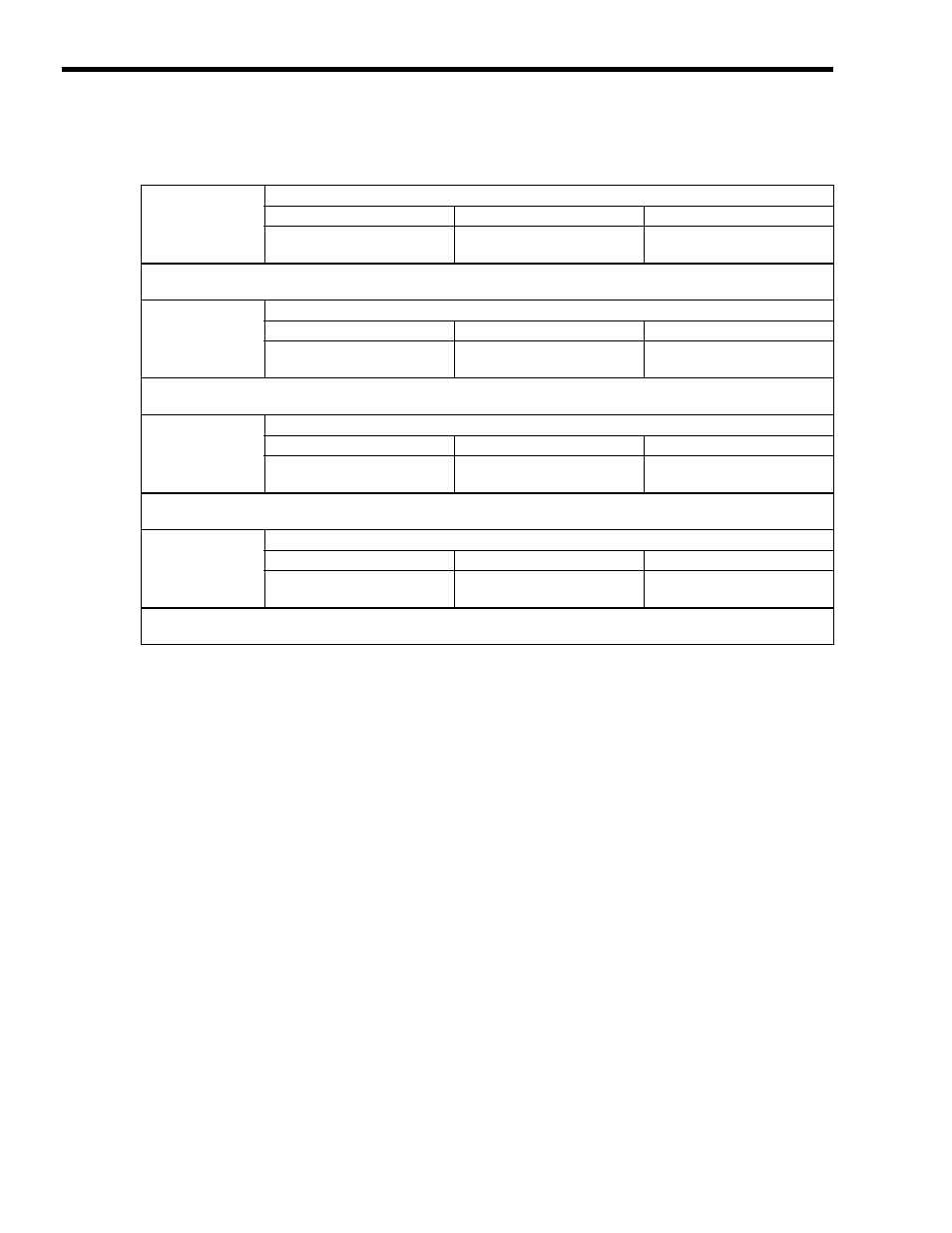
( 11 ) Speed Information
IL20
Speed Reference Output Monitor
Range
Unit
−2
31
to 2
31
−1
Speed Units (setting parameter
OW03, bits 0 to 3)
Stores the speed reference that is being output.
This parameter will be 0 for interpolation or phase control.
IL24
Integral Output Monitor
Range
Unit
−2
31
to 2
31
−1
Speed Units (setting parameter
OW03, bits 0 to 3)
Stores the integral output value when using PI control in the position loop (see setting parameter OW21, bit 8).
This parameter is used in Position Control Mode and Zero Point Return Mode.
IL26
Primary Lag Monitor
Range
Unit
−2
31
to 2
31
−1
Speed Units (setting parameter
OW03, bits 0 to 3)
Stores the following value: IL24
− the primary lag element's output.
This parameter is used in Position Control Mode and Zero Point Return Mode.
IL28
Position Loop Output Monitor
Range
Unit
−2
31
to 2
31
−1
Speed Units (setting parameter
OW03, bits 0 to 3)
Stores the position loop output value (before the feed forward value is added).
This parameter is used in Position Control Mode and Zero Point Return Mode.