Yaskawa MP2200 Machine Controller User Manual
Page 472
9 Utility Functions
9.1.3 Connections to
Σ Series SGDB SERVOPACK
9-8
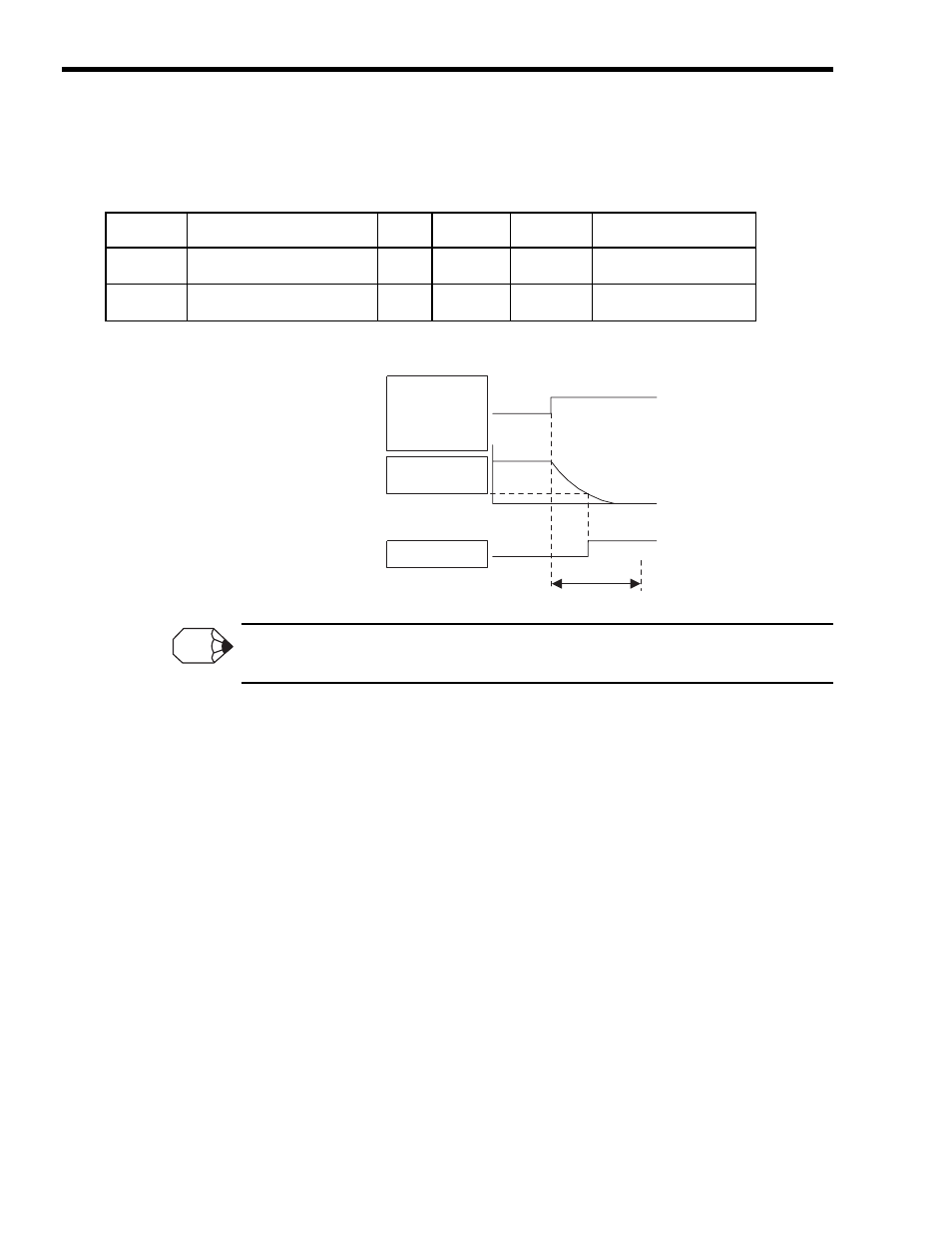
[ c ] Cn-15 and Cn-16 (Brake ON Timing when Motor Running)
Adjust the timing of the holding brake when the motor is running with the following parameters so
that the brake is applied after the Servomotor stops.
When using a Servomotor with a brake, set the timing of applying the brake when the Servo turns
OFF during motor running due to an /S-ON input signal or alarm.
The brake on the Servomotor is designed as a holding brake and it must be applied only after the motor
has stopped. Adjust this parameter while observing machine operation.
Parameter
Name
Unit
Setting
Range
Default
Control Mode
Cn-15
Speed Level for BK Signal
Output when Motor Running
min
−1
0 to max.
speed
100
Speed, torque, position
control
Cn-16
Output Timing of BK Signal
when Motor Running
10 ms
0 to 100
50
Speed, torque, position
control
Cn-15
Cn-16
/S-ON input or
alarm occurred.
Power OFF
Motor speed
(min
−1
)
/BK output
Brake
released
Servo ON
Servo OFF
Stop with dynamic
brake or by coasting
(Cn0001 bit 6)
Brake holding
INFO