Yaskawa MP2200 Machine Controller User Manual
Page 429
8.2 Motion Parameters
8-13
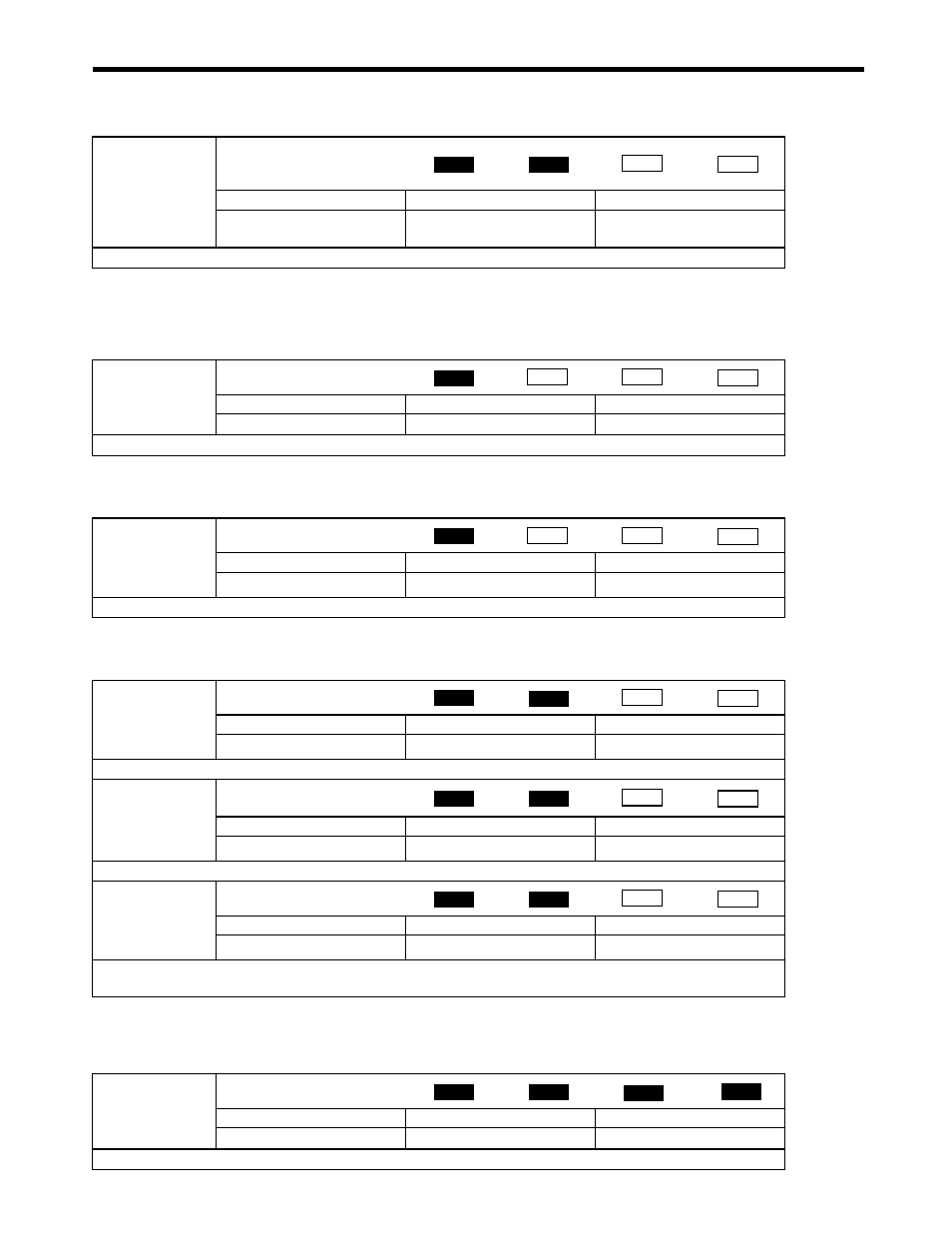
[ m ] Zero Point Return
[ n ] Step Distance
[ o ] Coordinate System Settings
[ p ] Supplemental Settings
OW3B
Bias Speed for Exponential
Acceleration/Deceleration
Filter
Setting Range
Setting Unit
Default Value
0 to 32767
Depends on speed unit
(OW03 bits 0 to 3).
0
Set the bias speed for the exponential acceleration/deceleration filter.
Position
Phase
Speed
Torque
OW3D
Home Window
Setting Range
Setting Unit
Default Value
0 to 65535
Reference Unit
100
Set the width to turn ON the Zero Point Position bit in the Position Management Status (monitoring parameter IB0C4).
Position
Phase
Speed
Torque
OL44
Step Distance
Setting Range
Setting Unit
Default Value
0 to 2
31
−1
Reference Unit
1000
Set the moving amount for STEP commands.
Position
Phase
Speed
Torque
OL48
Zero Point Offset
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference Unit
0
Set the offset to shift the machine coordinate system.
OL4A
Work Coordinate System
Offset
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference Unit
0
Set the offset to shift the work coordinate system.
OL4C
Preset Data of POSMAX Turn
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Rev
0
When the POSMAX Preset bit (setting parameter OW00 bit 6) is set to 1, the value set here will be preset as the POSMAX
Number of Turns (monitoring parameter IL1E).
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
OW5C
Fixed Parameter Number
Setting Range
Setting Unit
Default Value
0 to 65535
−
0
Set the number of the fixed parameter to read with the FIXPRM_RD motion subcommand.
Position
Phase
Speed
Torque