Yaskawa MP2200 Machine Controller User Manual
Page 333
Advertising
5.2 Motion Command Details
5-103
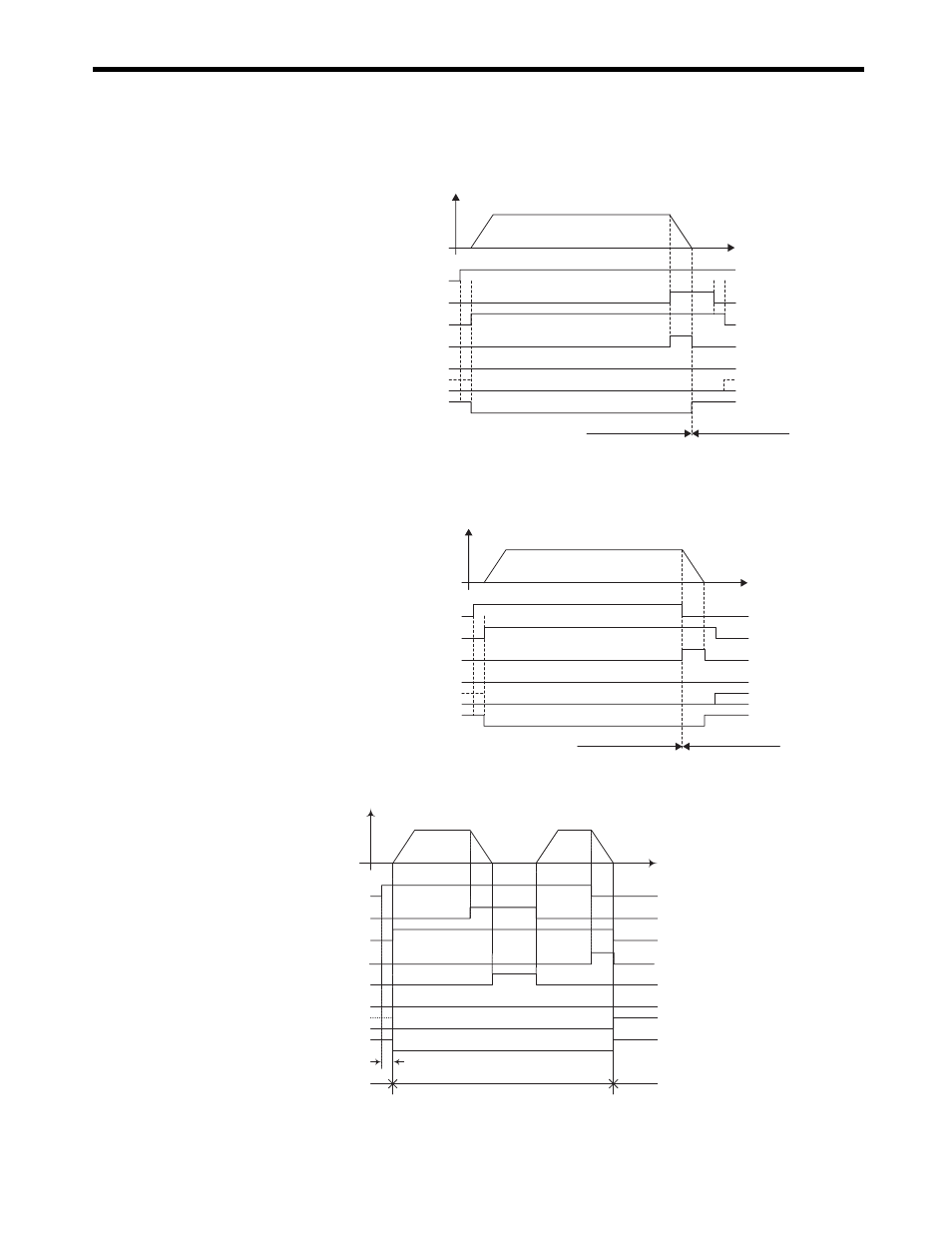
[ b ] Execution when Aborted
[ c ] Execution when Aborting by Changing the Command
[ d ] Execution for Pausing
OB
091 (ABORT)
Speed Control Mode
Position Control Mode
OW
08 = 23 (VELO)
IW
08 = 23 (VELO)
IB
090 (BUSY)
IB
098 (COMPLETE)
IB
093 (FAIL)
IB
0C0 (DEN)
Speed Control Mode
Position Control Mode
OW
08 = 23 (VELO)
IW
08 = 23 (VELO)
IB
090 (BUSY)
IB
098 (COMPLETE)
IB
093 (FAIL)
IB
0C0 (DEN)
OW
08=23 (VELO)
IW
08=23 (VELO)
IB
090 (BUSY)
IW
09.bit8 (COMPLETE)
IW
09.bit3 (FAIL)
IW
0C.bit0 (DEN)
1 scan
OB
090 (HOLD)
IB
091 (HOLDL)
Speed Control Mode
Position Control Mode
Advertising
This manual is related to the following products: