Yaskawa MP2200 Machine Controller User Manual
Page 428
8 SVR Virtual Motion Module
8.2.2 Motion Parameter Settings
8-12
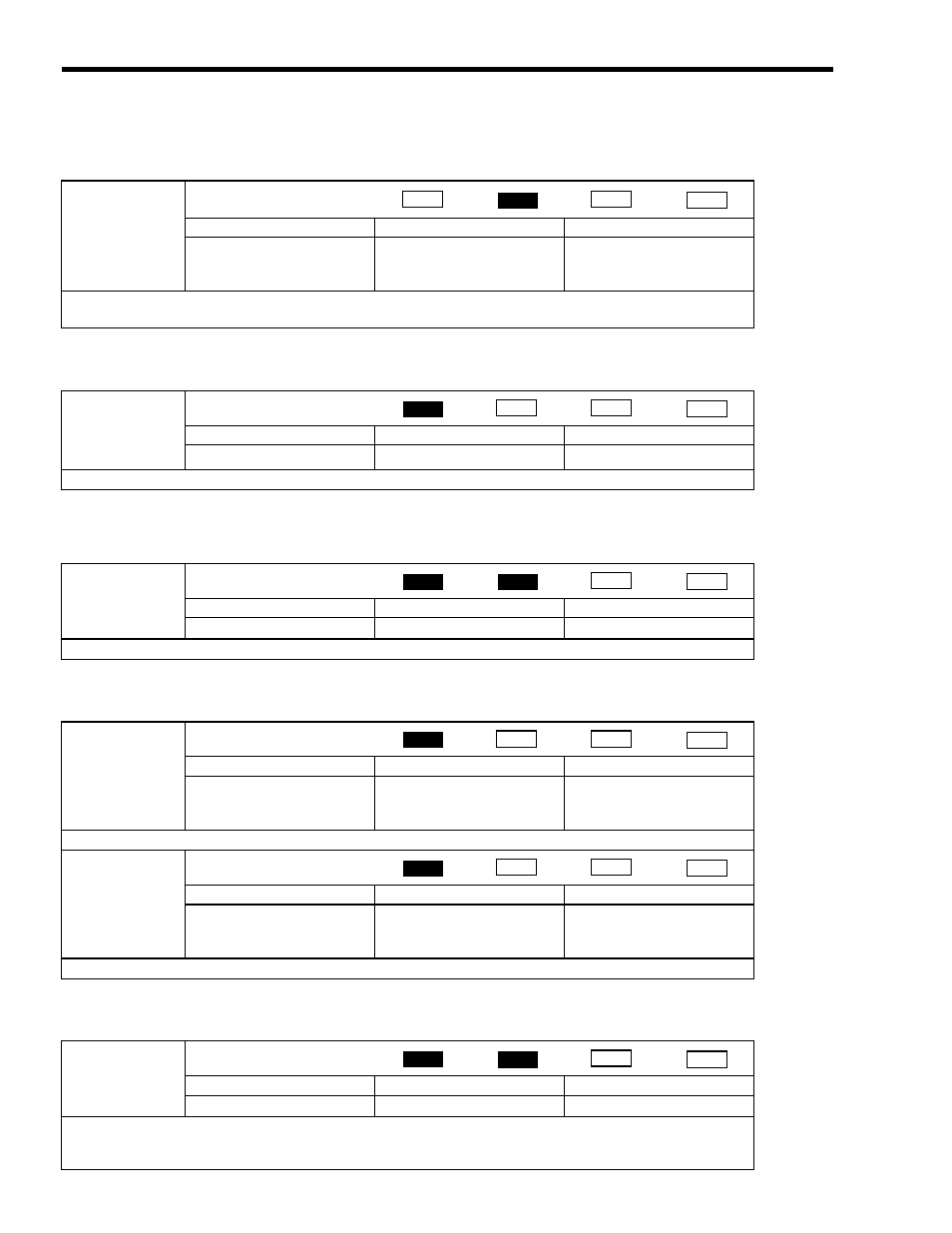
[ h ] Secondary Speed Compensation
[ i ] Position Reference Type
[ j ] Speed Amends
[ k ] Acceleration/Deceleration Settings
[ l ] Filters
OL16
Secondary Speed
Compensation
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Depends on the speed unit set in
Function 1 (setting parameter
OW03 bits 0 to 3).
0
Set the speed feed forward amount for the Phase Reference command (PHASE).
When used at the same time as Speed Amends (OW31), speed compensation can be performed twice.
Position
Phase
Speed
Torque
OL1C
Position Reference Setting
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference Unit
0
Set the position reference.
Position
Phase
Speed
Torque
OW31
Speed Amends
Setting Range
Setting Unit
Default Value
−32768 to 32767
0.01%
0
Set the speed feed forward gain as a percentage of the rated speed.
Position
Phase
Speed
Torque
OL36
Linear Acceleration Time
Setting Range
Setting Unit
Default Value
0 to 2
31
−1
Depends on Acceleration/
Deceleration Units (OW03
bits 4 to 7).
0
Set the rate or the time constant for linear acceleration.
OL38
Linear Deceleration Time
Setting Range
Setting Unit
Default Value
0 to 2
31
−1
Depends on Acceleration/
Deceleration Units (OW03
bits 4 to 7).
0
Set the rate or the time constant for linear deceleration.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
OW3A
S-curve Acceleration Time
Setting Range
Setting Unit
Default Value
0 to 65535
0.1 ms
0
Set the acceleration/deceleration filter time constant.
Always make sure that pulse distribution has been completed (i.e., that monitoring parameter IB0C0 is ON) before changing
the time constant.
Position
Phase
Speed
Torque