22 ) latch ( 23 ) gain and bias settings – Yaskawa MP2200 Machine Controller User Manual
Page 199
4.4 SVA-01 Module Parameter Details
4-79
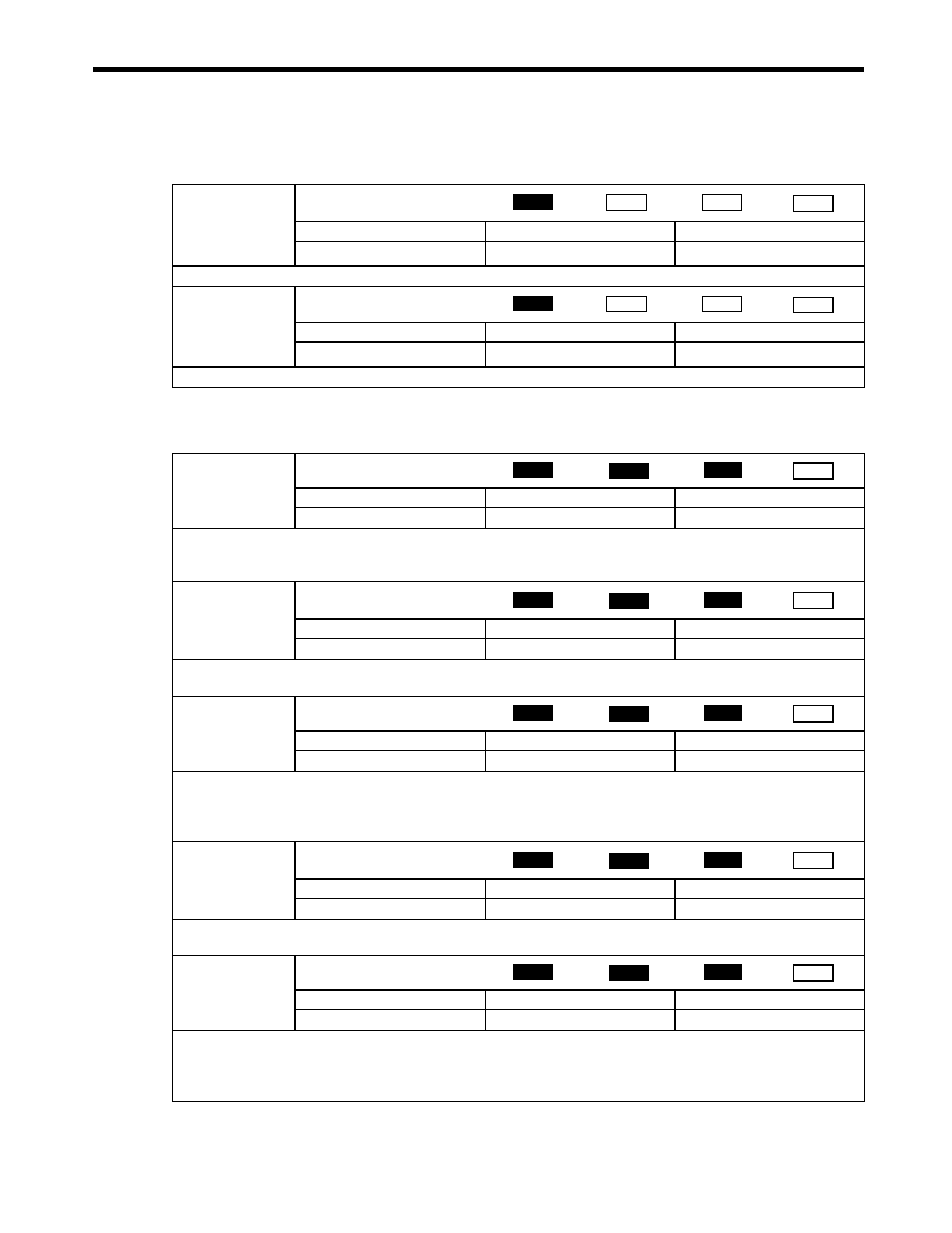
( 22 ) Latch
( 23 ) Gain and Bias Settings
OL2A
Latch Zone Lower Limit
Setting
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
2
31
−1
Set the range in which the latch signal is valid (position from the zero position) for external positioning.
OL2C
Latch Zone Upper Limit
Setting
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
2
31
−1
Same as above.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
OW2E
Position Loop Gain
Setting Range
Setting Unit
Default Value
0 to 32767
0.1/s
300
Determines the responsiveness of the position loop.
If the position loop gain is set high, the responsiveness is high and the positioning time is short.
Set the optimum value to match the machine's rigidity and inertia, as well as the type of Servomotor being used.
OW30
Speed Feed Forward
Compensation
Setting Range
Setting Unit
Default Value
0 to 32767
0.01%
0
The positioning time can be reduced by applying feed forward compensation.
This setting is effective for positioning control commands. Always set this parameter to 0 when using phase control.
OW31
Speed Amends
Setting Range
Setting Unit
Default Value
−32768 to 32767
0.01%
0
Set the speed feed forward gain as a percentage of the rated speed for the phase reference command (PHASE).
The setting units for this parameter is 0.01% (fixed). The setting unit for Secondary Speed Compensation (OL16), however,
can be selected by the user.
When used at the same time as OW16, speed compensation is applied twice.
OW32
Position Integration Time
Constant
Setting Range
Setting Unit
Default Value
0 to 32767
ms
0
This is the integration function for the position loop.
Use this parameter to improve the following precision in applications such as electronic cams or shafts.
OW33
Primary Lag Time Constant
Setting Range
Setting Unit
Default Value
0 to 32767
ms
0
Set the primary lag time constant (in ms) in the position loop.
If the time constant is set to 0, the primary lag calculation is not performed.
This filter is used in Position Control Mode and Zero Point Return Mode.
(
Note) Set this parameter to 0 unless it is needed, because the primary lag may cause oscillation.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque