Yaskawa MP2200 Machine Controller User Manual
Page 427
8.2 Motion Parameters
8-11
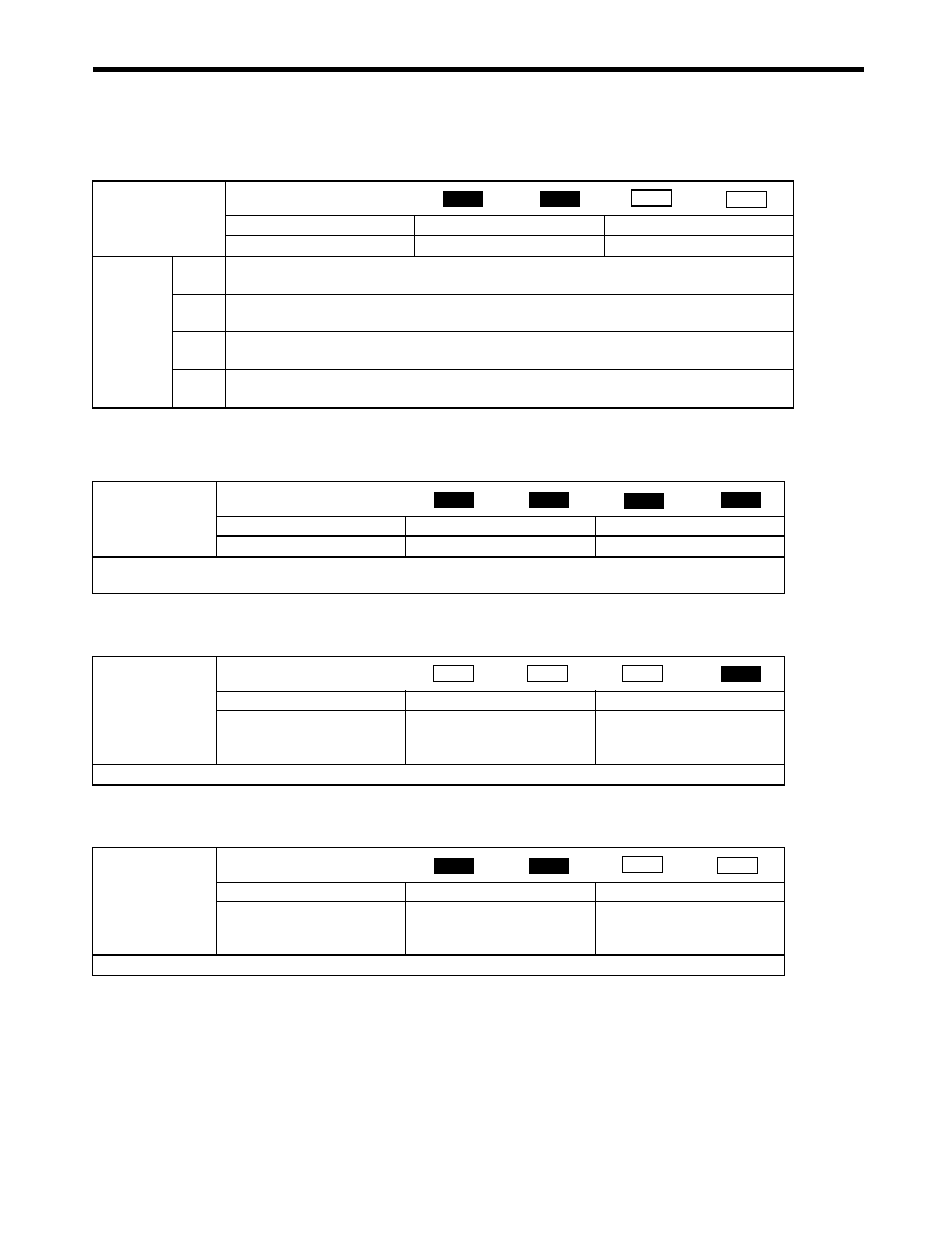
[ d ] Motion Command Control Flags
[ e ] Motion Subcommands
[ f ] Torque Reference
[ g ] Speed Reference
OW09
Motion Command Options
Setting Range
Setting Unit
Default Value
−
−
0000H
OW09
Bit 0
Command Pause
0: Command Pause OFF (default), 1: Command Pause ON
Bit 1
Command Abort
0: Command Abort OFF (default), 1: Command Abort ON
Bit 2
JOG/STEP Direction
0: Forward (default), 1: Reverse
Bit 5
Position Reference Type
0: Incremental addition mode (default), 1: Absolute position reference mode
Position
Phase
Speed
Torque
OW0A
Motion Subcommand
Setting Range
Setting Unit
Default Value
0 to 5
−
0
Set the motion subcommand to be used with the motion command.
Only 0: NOP and 5: FIXPRM_RD can be used.
Position
Phase
Speed
Torque
OL0C
Torque Reference
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Depends on the torque unit set in
Function 1 (setting parameter
OW03 bits C to F).
0
Set the torque reference for torque reference commands.
Position
Phase
Speed
Torque
OL10
Speed Reference
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Depends on the speed unit set in
Function 1 (setting parameter
OW03 bits 0 to 3).
3000
Set the speed reference.
Position
Phase
Speed
Torque