4 ) interpolation (interpolate), A ] operating procedure – Yaskawa MP2200 Machine Controller User Manual
Page 441
8.3 Motion Commands
8-25
( 4 ) Interpolation (INTERPOLATE)
The INTERPOLATE command positions the axis according to the target position that changes in
sync with the high-speed scan. The positioning data is generated by a ladder program.
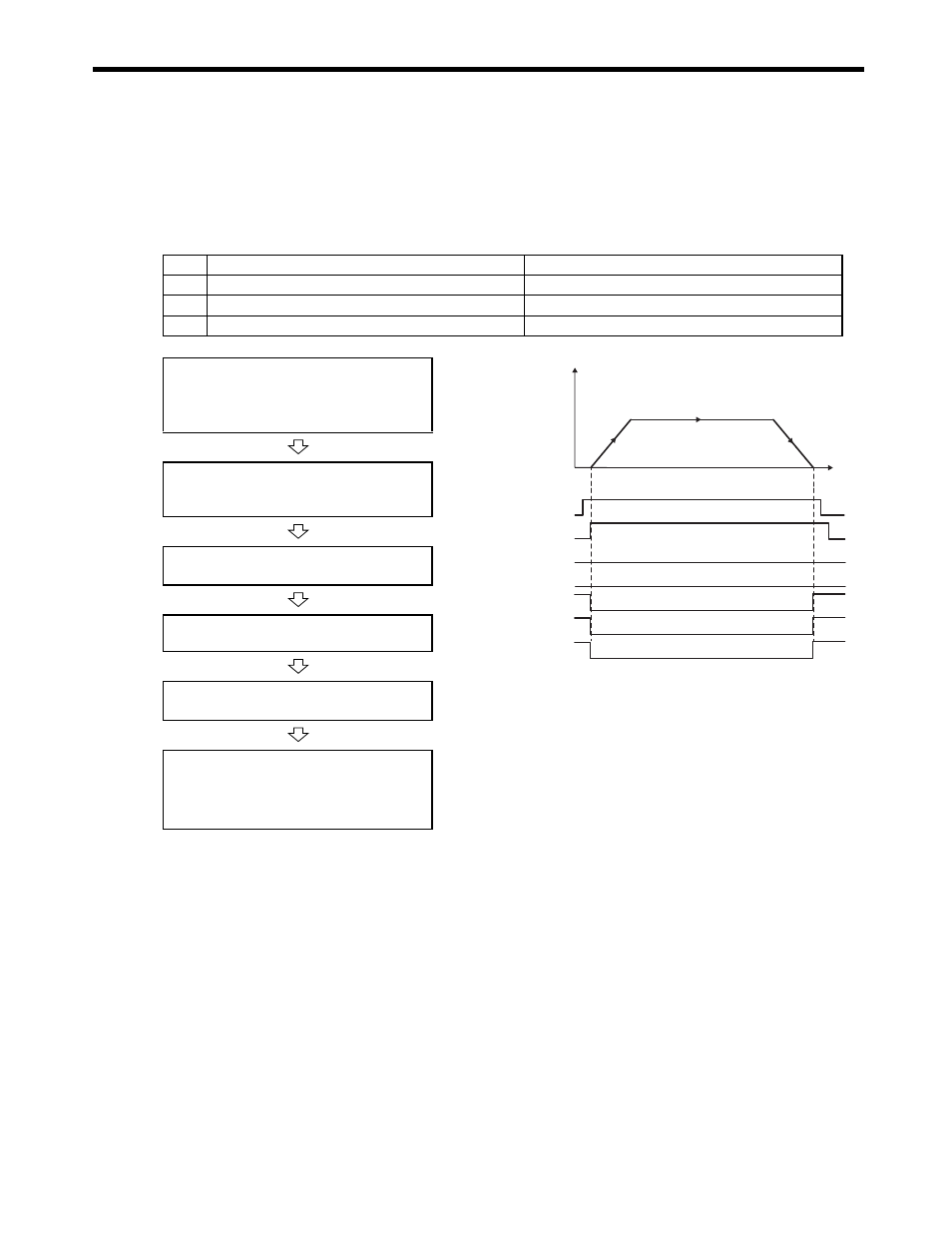
[ a ] Operating Procedure
(
Note) The following position information is updated during command execution.
• Machine Coordinate Target Position (TPOS) (IL0E)
• Target Position (CPOS) (IL10)
• Machine Coordinate System Position (MPOS) (IL12): MPOS is always equal to CPOS.
• Machine Coordinate Feedback Position (APOS) (IL16): APOS is always equal to CPOS.
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
Both IL02 and IL04 are 0.
2
The Servo ON condition.
IB001 is ON.
3
Motion command execution has been completed.
IW08 is 0 and IB090 is OFF.
Set the motion setting parameters.
• Target Position: OL1C
• Acceleration/Deceleration Filter Type:
OW03
• Speed feed forward compensation can be applied.
• Generate the positioning data each high-speed scan from the ladder
logic program.
• The travel speed is calculated automatically.
• The Command Pause (OB090) cannot be used.
• The Command Abort (OB091) cannot be used.
• Change a motion command to stop interpolation execution.
Execute the interpolation (INTERPOLATE)
motion command.
• Set OW08 to 4.
Positioning starts.
• IW08 will be 4 during positioning.
Change the Target Position (OL1C) every
high-speed scan.
Positioning Completed
• IB0C1 will turn ON.
Execute NOP motion command.
• Set OW08 to 0.
0
OW
08 = 4
(INTERPOLATE)
IW
08 = 4
(INTERPOLATE)
IB
090 (BUSY)
IB
098 (COMPLETE)
IB
0C0 (DEN)
IB
0C1 (POSCOMP)
IB
0C3 (NEAR)
Position
Speed (%)
Time (t)