General purpose mode application preset, 5 iqpump presets and functions – Yaskawa iQpump1000 AC Drive Quick Start User Manual
Page 180
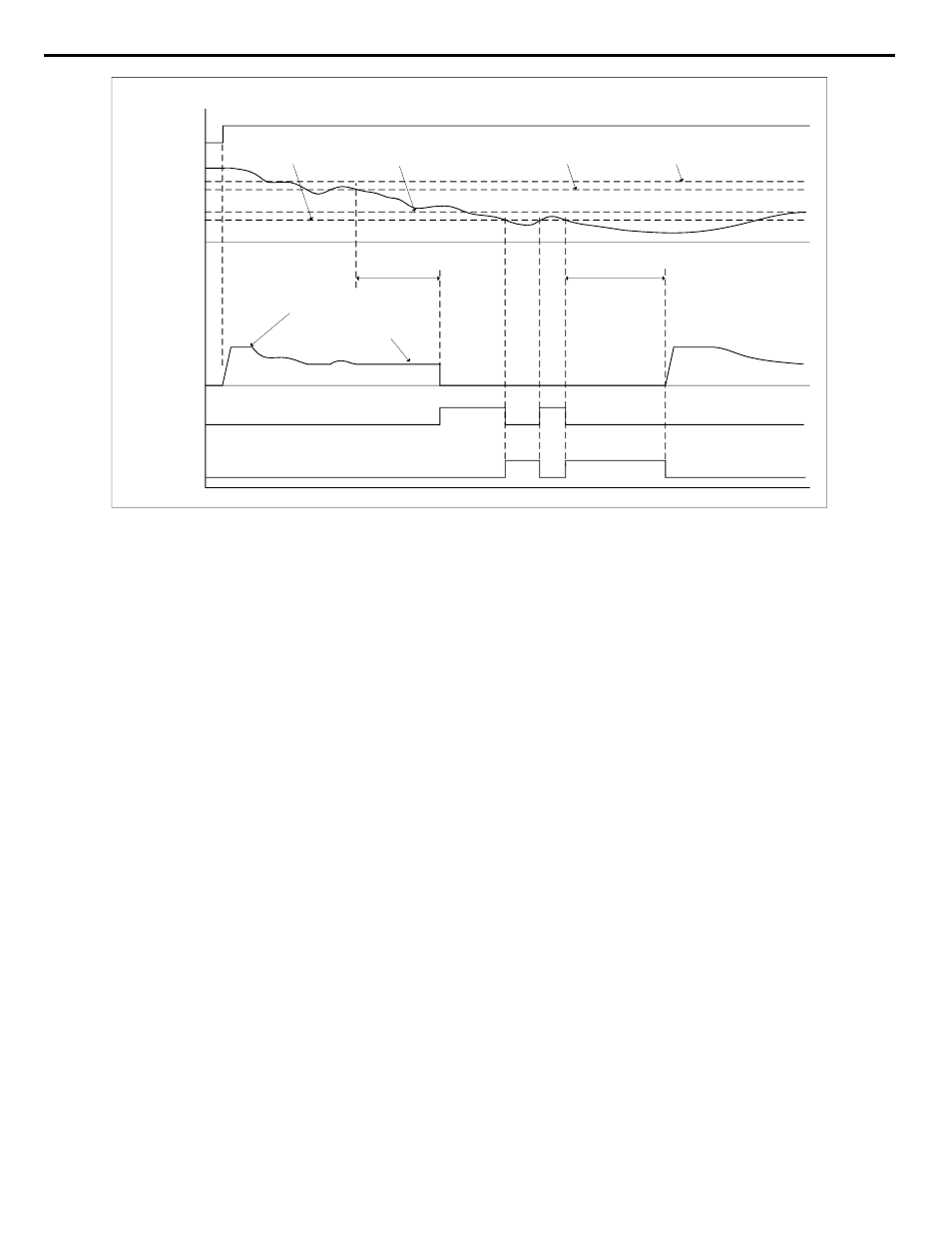
G eo the rm al Slee p
H igh and Lo w T em pe rature O pe ration
O utpu t
F requen c y
A uto R un
C omm an d
G eo the rm al
T em p
(H 3-0 x = 21)
( U1 -80 )
Q 2-10
G eo thrm S lp D ly
“S leep A c tiv e – W ait
F or S tart” M ess age
“S tart D elay –
T im er A c tiv e”
M ess ag e
G eo the rm al E nab led (b 1-01 = 5 ), G eo the rm al S leep E nab led (Q 2 -11 > 0 .0 )
Q 2- 03
M in G eo the rm S pee d
Q 2-12
G eo thrm W ak e D ly
Q 2-04
M ax G eo the rm S pee d
Q 2 -06
Lo w Tem p @ M in
W ak e Le v el
(Q 2- 06 – Q 2-11 )
Q 2 -07
H igh T em p @ M in
W ak e Le v el
(Q 2-07 + Q 2-11 )
Figure 4.12 Geothermal Sleep – High and Low Temperature Operation
n
General Purpose Mode Application Preset
The purpose of this mode is to allow the drive controller to run a motor at a set speed without the PI process loop. This preset
is designed to simplify using the drive for applications other than pumping control. The default settings call for the frequency
reference to be an analog input and the run command to come from the terminal strip via a maintain contact closure. The PI
loop is disabled and no process feedback is required.
Required Control Wiring
No additional control wiring is required when the drive controller is at its default settings.
Start Up Procedure
1.
Set parameter A1-03 to 7770 (General Purpose Mode) to pre-set parameter values for this application.
2.
Set the source of the frequency reference for the drive controller in parameter b1-01. The default setting is from the
terminal strip via a 0 to 10 V analog signal wired into terminal A1.
3.
Set the source of the Run Command for the drive controller in parameter b1-02. The default setting is from the terminal
strip via a maintained contact closure.
4.
Set the Acceleration Time of the motor in parameter C1-01. This is the time to accelerate the motor from zero speed
to 60 Hz (E1-04 Maximum Output Frequency).
5.
Determine the stopping method of the motor. The default setting is coast to stop. To ramp the motor to a stop, set
b1-03 to 0 and then set the motor deceleration time in parameter C1-02. This is the time to stop the motor from to 60
Hz (E1-04 Maximum Output Frequency) to zero speed.
6.
Set the motor-rated current in parameter E2-01. This information can be found on the motor nameplate or specification
sheet.
7.
Set the number of motor poles in parameter E2-04 (2-pole motors have a rated RPM of slightly less than 3600 RPM;
4-pole motors have a rated RPM of slightly less than 1800 RPM). This information can be found on the motor
nameplate or specification sheet.
8.
Determine whether the drive controller should attempt to reset itself after a fault. The default setting is disabled. The
function is turned on by setting 1 to 10 reset attempts in parameter L5-01 and the time between each reset in parameter
L5-04.
9.
Set the minimum speed at which the motor can run in parameter P1-06. The default is 0 Hz. If the system has a
minimum safe operation speed, set it in P1-06. This will act as a lower limit of the frequency reference.
4.5 iQpump Presets and Functions
180
YASKAWA TOEP YAIP1W 01B YASKAWA AC Drive - iQpump1000 Quick Start Guide