Figure 354 – Basler Electric BE1-11m User Manual
Page 540
528
9424200996 Rev L
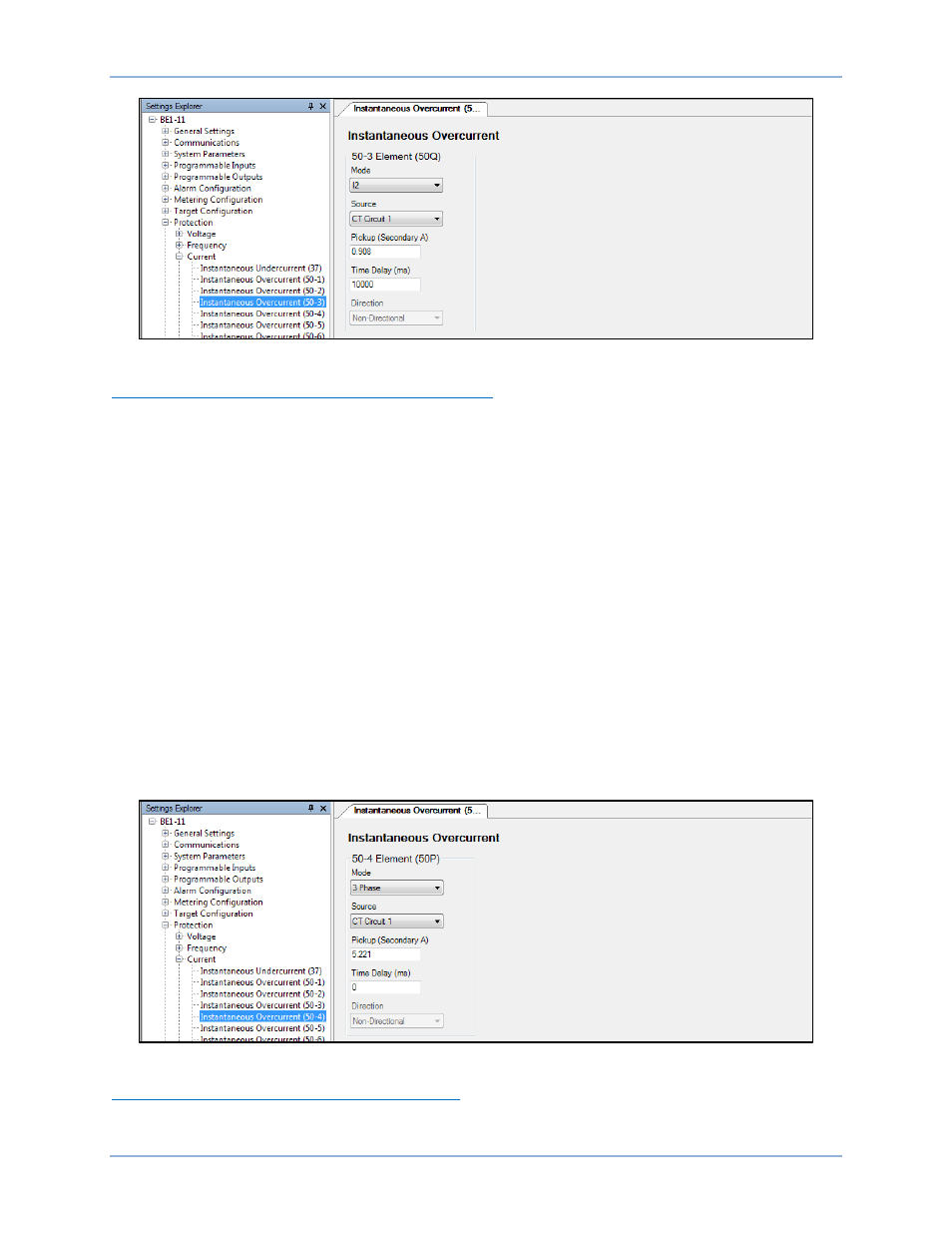
Figure 354. Protection, Current, Instantaneous Overcurrent (50-3) Screen
Instantaneous Overcurrent (50-4) - Overload Protection
The 50-4 element is used for overload protection while the motor is running. This protection is configured
according to the service factor of the motor. The pickup setting should be 115 to 125 percent of the
service factor per IEEE C37.96-2000, IEEE Guide for AC Motor Protection. If the service factor is 1.0,
then overload pickup should be 115 percent of FLA. The pickup setting should be 130 percent of FLA for
a service factor of 1.15. If the service factor is unknown, use 1.0. In this example, the service factor is 1.0
and the pickup setting is calculated using Equation 46. Secondary full load amps is calculated in Equation
38.
𝑃𝑖𝑐𝑘𝑢𝑝 = 𝐹𝐿𝐴
𝑆𝑒𝑐𝑜𝑛𝑑𝑎𝑟𝑦
∙ 1.15 = 4.54 ∙ 1.15 = 5.221 𝐴 𝑠𝑒𝑐𝑜𝑛𝑑𝑎𝑟𝑦
Equation 46. 50-4 Pickup
A delay is used to prevent the BE1-11m from operating under temporary overloads while the motor is
running. Typically, the delay is set short, but can be set longer if the process is significant or if an operator
is regulating the load. The NEMA MG-1 standard states that “a large induction motor can withstand an
occasional overload of 1.5
• FLA for 30 seconds.” A conservative time delay (using a factor of 1) is
calculated in Equation 47. The hot safe stall time is found in the motor manufacturer data.
𝑇𝑖𝑚𝑒 𝐷𝑒𝑙𝑎𝑦 = 1 ∙ 𝐻𝑜𝑡 𝑆𝑎𝑓𝑒 𝑆𝑡𝑎𝑙𝑙 𝑇𝑖𝑚𝑒 (9 𝑠) = 9 𝑠𝑒𝑐𝑜𝑛𝑑𝑠
Equation 47. 50-4 Time Delay
Select three-phase mode, set the Pickup setting to 5.221 A, and set the Time Delay to 9 seconds as
shown in Figure 355.
Figure 355. Protection, Current, Instantaneous Overcurrent (50-4) Screen
Instantaneous Overcurrent (50-5) - Jam Protection
The 50-5 element is used for jam protection while the motor is running. It protects the motor when the
load torque exceeds the torque capacity of the motor. This condition develops motor current equal to or
Settings Calculation Examples
BE1-11m