Yaskawa MP920 Motion Module User Manual
Page 105
2.4 Position Control Using Motion Commands
2-79
2
6. Once positioning has been completed, clear the fixed length feed motion command.
Note: Fixed length feed is detected at the leading edge. Therefore, when
fixed length feed has been executed, the motion command must be
set to NOP for 1 scan or more, and fixed length feed must be reset as
the motion command.
User Program Example: Fixed Length Feed
Example of RUN Operation
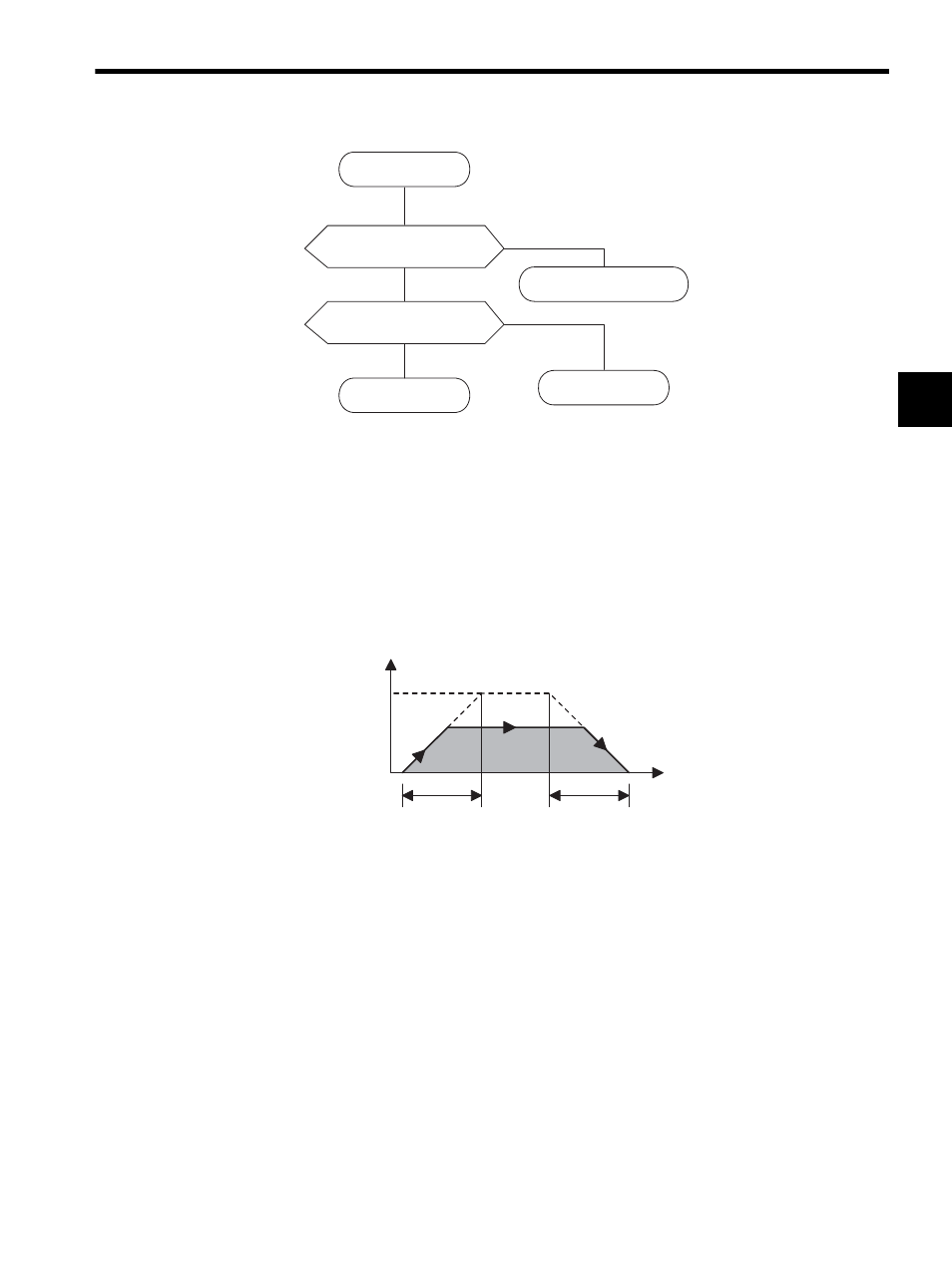
Fig. 2.23 Example of a Fixed Length Feed Pattern
YES
NO
YES
NO
STEP
End condition check
Return (STEP completed)
Motion command response
= STEP?
Return (Other motion
command executing)
Return (STEP executing)
Motion command status
BUSY = OFF?
0
Speed (%)
100%
Linear acceleration time consatant
Linear deceleration time consatant
Rated speed
STEP travel
distance
Time (t)
Rapid traverse
speed