2 motion setting parameters, Caution – Yaskawa MP920 Motion Module User Manual
Page 341
7.3 PO-01 Parameters
7-39
7
7.3.2
Motion Setting Parameters
• Zero Point Position Offset in the Machine Coordinate System (ABSOFF)
This register contains data used by PO-01 Modules for position control and the follow-
ing movements are affected if this register is set incorrectly. Check to see if the data is
set correctly prior to starting operation.
Obstructions may damage tools and lead to personal injury if this check is not performed.
CAUTION
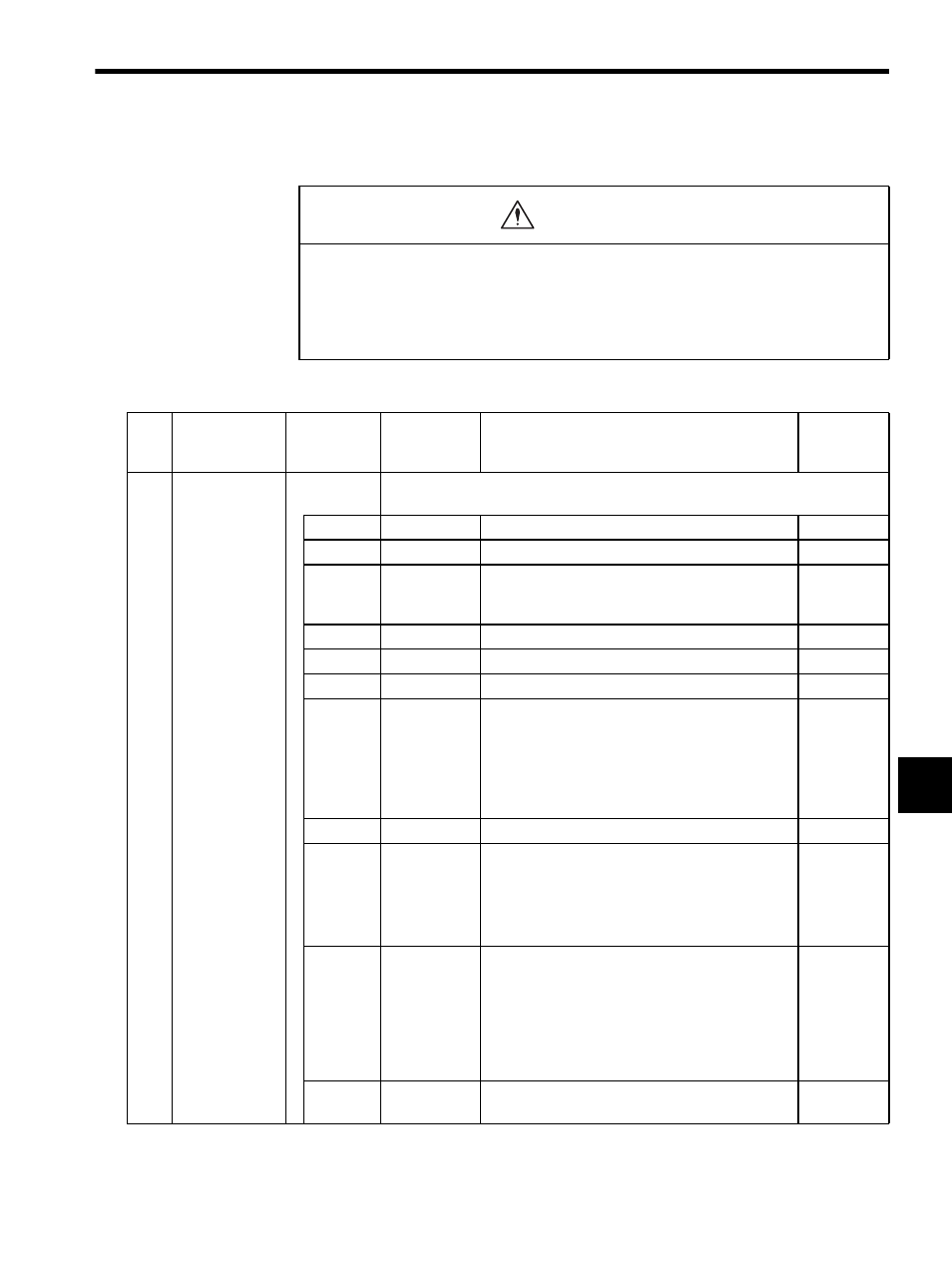
Table 7.10 Motion Setting Parameters
No. Name
Register
Number
Setting
Range/
Bit Name
Description
Factory
Setting
1
RUN Mode
Settings
(RUNMOD)
OW00
Set the RUN mode, such as Control Mode and Alarm Reset. The bit configuration is
shown below.
Bit 0
Not used.
Set to “0.”
0
Bit 1
Not used.
Set to “0.”
0
Bit 2
Position
Control Mode
(PCON)
Used to set Position Control Mode.
0: OFF, 1: ON
1
(Used)
Bit 3
Not used.
Set to “0.”
0
Bit 4
Not used.
Set to “0.”
0
Bit 5
Not used.
Set to “0.”
0
Bit 6
Alarm Clear
(ACR)
The following monitoring parameters will be cleared
when this bit turns ON.
• IW00 RUN Status: Error Counter Over (bit 0)
and Motion Setting Parameter Setting Error (bit 1)
• Alarms (IL22)
0: OFF, 1: ON
0
Bit 7
Not used.
Set to “0.”
0
Bit 8
Motion Com-
mand Mode
Enable/Dis-
able
(MCDSEL)
Set whether an OW20: Motion Command Code
is used or not.
0: Disable
1: Enable
Always set to “1.”
1
Bit 9
Zero Point
Return Direc-
tion Selection
(ZRNDIR)
Set the direction for returning to the zero point.
0: OFF
Reverse direction
(position pulse in the deceleration direction)
1: ON
Forward direction
(position pulse in the acceleration direction)
0
Bits 10 to
15
Not used.
Set to “0.”
0