Yaskawa MP920 Motion Module User Manual
Page 337
7.3 PO-01 Parameters
7-35
7
21
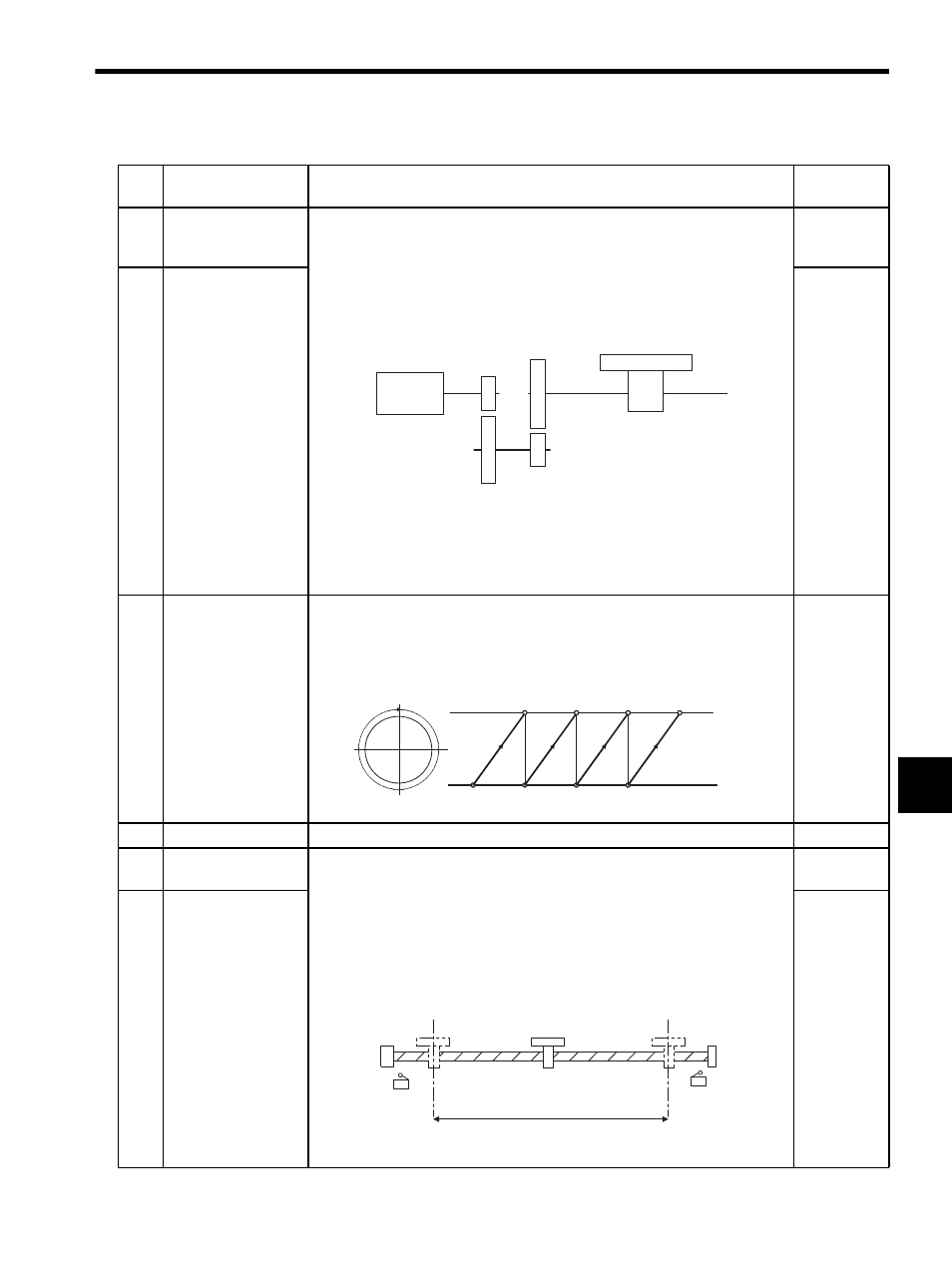
Servomotor Gear
Ratio
(GEAR_MOTOR)
These parameters determine the gear ratio between the motor and the load.
The following two values are set for a configuration in which the load shaft will
turn n times in response to m turns of the motor shaft.
• Gear ratio at Servomotor: m
• Gear ratio at load: n
Setting Example
In the above example, the reduction ratio is n/m, or 3/7
× 4/9 = 4/21. The follow-
ing setting would thus be made.
Servomotor Gear Ratio: 21
Load Gear Ratio: 4
1
22
Machine Gear Ratio
(GEAR_MACHINE)
1
23
Infinite Length Axis
Reset Position
(POSMAX)
Set the reset position for a rotation when infinite length axis is set.
This parameter is not valid when a finite length axis is set.
• Setting range: 1 to 2
31
-1 [reference units]
Example: For a rotating load, the value will be reset every 360
°.
360000
25
Not used.
−
0
27
Positive Software
Limit (SLIMP)
Set the positions at which the software limit function is to operate on the machine
coordinate system.
• Setting range: 1 to 2
31
-1 [reference units]
Whether or not the software limits are used is set in bit 7 and bit 8 of the Servo
Controller Function Selection Flags at fixed parameter No. 17.
With the software limits, the upper and lower limits of the range of movement for
the machine system are set at fixed parameters and the operating range is con-
stantly monitored by the controller.
2147483647
29
Negative Software
Limit (SLIMN)
-2147483648
Table 7.9 Motion Fixed Parameters (cont’d)
No. Name
Description
Factory
Setting
Motor shaft:
m turns
7 turns
3 turns
9 turns
4 turns
Load shaft: n turns
270
°
180
°
90
°
0
°
0
POSMAX
Software limit
(lower limit)
Software limit
(upper limit)
Forward direction
overtravel
Reverse direction
overtravel
(Range of movement for the machine)