Yaskawa MP920 Motion Module User Manual
Page 384
9 Application Precautions
9.1.2 SGDA SERVOPACK Connections
9-4
This setting determines the timing for stopping the Servomotor. Set Cn-15 and Cn-16 for brake opera-
tion with the Servomotor running.
/BK output (brake operation) and the servo are turned OFF at the same time for the factory settings. In
this case, the machine may move slightly due to gravity depending on the machine configuration and
brake characteristics. This movement can be eliminated by delaying servo OFF operation.
Cn-15 and Cn-16
(Brake Output Speed Level and Timing during Motor Operation)
Use the following parameters to apply the holding brake when the Servomotor is stopped
during Servomotor operation.
When using a Servomotor with brake, be sure to set the brake timing when the /S-ON signal
(1CN-14) is input while the Servomotor is running or when an alarm turns the servo OFF.
The Servomotor brake is designed only for holding purposes. The brake must be applied with proper
timing when the Servomotor stops. Adjust this parameter while monitoring machine operation.
INFO
Cn-15
Brake Output Speed
Level during Motor Op-
eration
Units:
r/min
Setting Range:
0 to max.
speed
Factory Setting:
100
Speed/torque
control and po-
sition control
Cn-16
Brake Output Timing
during Motor Operation
Units:
10 ms
Setting Range:
0 to 100
Factory Setting:
50
Speed/torque
control and po-
sition control
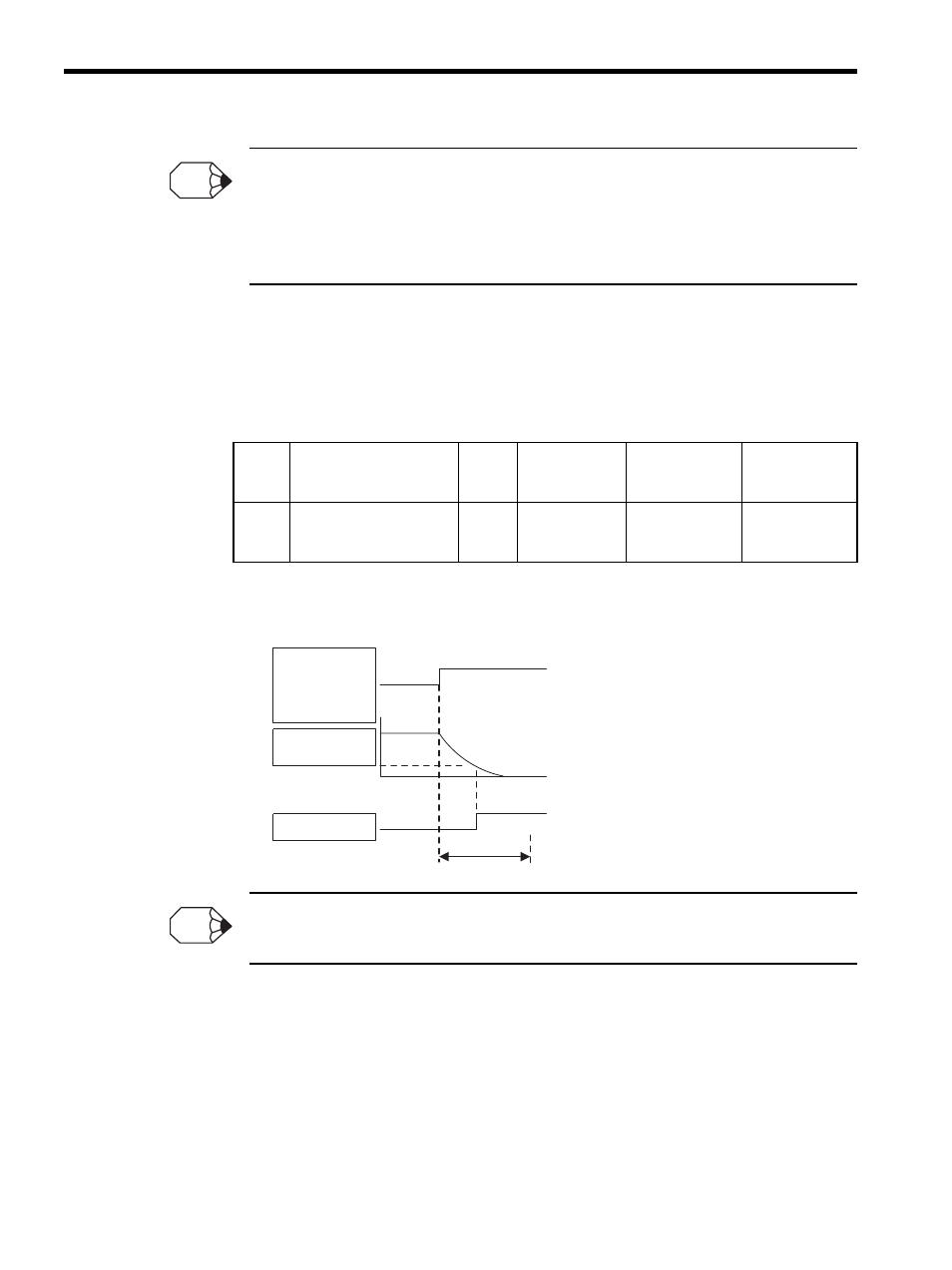
/S-ON input
(1CN-14) or an
alarm turns the
power supply
OFF
Motor speed
(r/min)
Cn-15
/BK output
Brake
released
Servo ON
Servo OFF
Dynamic brake
or free run stop
(Pn001.0)
Cn-16
Brake holding
INFO